
ЛљгкОЉЮЂбХИёCME-M7ЕФжЧФмЛњЦїШЫПижЦЯЕЭГЩшМЦгыЪЕЯж
ЗЂВМЪБМфЃК2015-11-10 13:31
ЗЂВМепЃКdesignapp
|
ЁЁЁЁ1 ЧАбд ЁЁЁЁаТЕФПЦММгыММЪѕвбОШУЯжНзЖЮЙЄвЕЛњЦїШЫЪЕЯжИпОЋШЗЖШЕФЫЎЦНЁЃЛњЦїШЫЕФгІгУдНРДдНЙуЗКЃЌашЧѓдНРДдНДѓЃЌЦфММЪѕбаОПгыЗЂеЙдНРДдНЩюШыЃЌетНЋЬсИпЙЄвЕЩњВњТЪгыВњЦЗжЪСПЃЌЮЊЩчЛсДДдьОоДѓЕФВЦИЛЁЃЙЄвЕЛњЦїШЫЕФЗЂеЙРњЪЗЙЄвЕЛњЦїШЫЕЎЩњгк 20 ЪРМЭ 60 ФъДњЃЌ 20 ЪРМЭ 90 ФъДњЕУЕНбИЫйЗЂеЙЃЌЯжНзЖЮзюЯШНјВњвЕЛЏЕФЛњЦїШЫЪЧзлКЯСЫМЦЫуЛњЁЂПижЦТлЁЂЛњЙЙбЇЁЂаХЯЂКЭДЋИаММЪѕЁЂШЫЙЄжЧФмЁЂЗТЩњбЇЕШЖрбЇПЦЖјаЮГЩЕФИпаТММЪѕЃЌЪЧЕБДњбаОПЪЎЗжЛюдОЃЌгІгУШевцЙуЗКЕФММЪѕСьгђЁЃЫќЪЧЮЊСЫЪЪгІжЦдьвЕЙцФЃЛЏЩњВњЃЌНтОіЕЅЕїЁЂжиИДЕФЬхСІРЭЖЏКЭЬсИпЩњВњжЪСПЖјДњЬцШЫЙЄзївЕЖјВњЩњЕФЁЃдкЮвЙњЙЄвЕЛњЦїШЫЗЂеЙДгГѕВНЪЙгУНзЖЮЕНФПЧАзджїПЊЗЂНзЖЮЕФзЊБфЃЌДйНјСЫЮвЙњжЦдьвЕЃЌПБЬНвЕЕШаавЕЕФЗЂеЙЁЃЙЪЙЄвЕЛњЦїШЫММЪѕЗЂеЙМЋЮЊХюВЊгыЛ§МЋЁЃ ЁЁЁЁЙЄвЕЛњЦїШЫЪЧгЩВйзїЛњ(ЛњаЕБОЬх) ЁЂПижЦЦїЁЂЫХЗўЧ§ЖЏЯЕЭГКЭМьВтДЋИазАжУЙЙГЩ;ЪЧвЛжжЗТШЫВйзїЁЂздЖЏПижЦЁЂПЩжиИДБрГЬЁЂФмдкШ§ЮЌПеМфЭъГЩИїжжзївЕЕФЛњЕчвЛЬхЛЏздЖЏЛЏЩњВњЩшБИЁЃ ЁЁЁЁОЉЮЂбХИёЪзДДбаЗЂВЂвбПЊЪМВњвЕЛЏЕФМЏFPGA/CPU/SRAM/ASIC/ADC/FlashЮЊвЛЬхЕФЁАПЩЖЈжЦПЩжиЙЙПЩБрГЬЁБЖрЙІФмИпадФмЕЭГЩБОПЩХфжУгІгУЦНЬЈ(CAP),дкОМУНЈЩшЕФИїИіСьгђОпгаЙуЗКЕФгІгУЃЌБЛгўЮЊЖржжаавЕЕФЁАЭђФмаОЦЌЁБЃЌЭъШЋЗћКЯЙЄвЕЛњЦїШЫаавЕаТЕФЗЂеЙЧїЪЦЁЃ ЁЁЁЁгжЕБCME ЫљЖРДДЕФПЩХфжЦгІгУЦНЬЈ(CAP)РДГЩЮЊПижЦКЫаФЃЌПЩЬсЙЉЙЄвЕЛњЦїШЫЕШетРрашвЊЖрЦЗжжЃЌБфЛЏДѓЃЌгжХњСПЕФПЩжиИДБрГЬгІгУСьгђашЧѓЁЃ ЁЁЁЁCAPМмЙЙгкДЫЦНЬЈЩЯКѓПЩЪЙЙЄвЕЛњЦїШЫММЪѕПЩЪЕЯжгкМЦЫуЛњЁЂПижЦТлЁЂЛњЙЙбЇЁЂаХЯЂКЭДЋИаММЪѕЁЂШЫЙЄжЧФмЁЂЗТЩњбЇЕШЖрбЇПЦЖјаЮГЩЕФИпаТММЪѕдЫЫуПижЦЁЃПЩгІЖдЛЗОГзДЬЌЕФПьЫйЗДгІКЭЗжЮіХаЖЯФмСІЃЌгжПЩЪЙЛњЦїГжајЙЄзїЁЂИпОЋШЗЖШЁЂЧПЛЏПЙЖёСгЛЗОГЕФФмСІЃЌДгЖјДяЕНЩЯЪівЊЧѓЕФгХЕуЁЃ ЁЁЁЁЛњЦїШЫММЪѕЪЧШкКЯСЫаэЖрбЇПЦЕФжЊЪЖЃЌЙњФквбЙуЗКАбЛњЦїШЫжЦзїБШШќзїЮЊДДаТНЬг§ЕФеНТдадЪжЖЮЁЃЁБДѓбЇЩњЛњЦїШЫДѓШќЁБЁЂЁАЛњЦїШЫЯрЦЫДѓЛсЁБЁЂЁАЛњЦїШЫзуЧђШќЁБЕШИїжжРраЭЕФЛњЦїШЫжЦзїБШШќЃЌХрбјбЇЩњЕФЖЏЪжФмСІЁЂДДдьФмСІЁЂКЯзїФмСІКЭНјШЁОЋЩёЃЌЭЌЪБвВЦеМАжЧФмЛњЦїШЫЕФжЊЪЖЁЃЬсЩ§бЇЩњЕФПЊЗЂММФмЫЎЦН,врВЛЗІжкЖрПЦММНчШЫЪПВЮгыбЇЯАгыбаОППЊЗЂЁЃ ЁЁЁЁЛљгкCMEЕФПЩХфжЦгІгУЦНЬЈ(CAP)ЩшМЦЕФЛњЦїШЫЃЌЪЕЯжСЫЛњЦїШЫЕФЛљБОЖЏзїЁЂТЗОЖИњзйЁЂздЖЏОРЦЋЁЂХФЩугАЯёЁЂЗжЮіЖдЯѓЁЂЬНВтЛЗОГЁЂЪЕЪБЯдЪООрРыЕШИпНзЙІФмЁЃ ЁЁЁЁCME-M7ПЩХфжЦгІгУЦНЬЈ(CAP)ЪЧвЛПюМЏГЩСЫИќИпМЖMCUФкКЫКЭИпадФмFPGAЕФжЧФмаЭаОЦЌЃЌЭЈЙ§НЋFPGAЁЂCPUЁЂSRAMЁЂASICЁЂFlashЁЂADCЁЂLVDSЁЂИпЫйPHYвдМАФЃФтЕЅдЊЕШЙІФмФЃПщМЏГЩдкЕЅвЛаОЦЌЩЯЃЌCME-M7ФмЙЛТњзуВЛЭЌгІгУГЁКЯЕФЁАПЩЖЈжЦПЩжиЙЙПЩБрГЬЁБЩшМЦашЧѓЃЌЪЕЯжСЫFPGAЕФSoCЛЏЁЃ ЁЁЁЁCME-M7ЕФFPGAВПЗжВЩгУИпДя12KШнСПЕФаТаЭLP (Logic ParcelЃЌТпМАќ)НсЙЙЃЌгХЛЏСЫFPGAгыИпМЖMCUФкКЫЕФЭЈаХНгПкЃЌПЭЛЇПЩИљОнЩшМЦашЧѓдкFPGAЩЯЪЕЯжВЛЭЌРраЭНгПкЁЃЭЌЪБЃЌCME-M7ЕФИпМЖMCUФкКЫНсЙЙЛљгкFPGAгІгУвВНјааСЫгХЛЏЃЌЪ§ОнгыГЬађПеМфОљЖЏЬЌПЩЕїЁЃ ЁЁЁЁРћгУFPGAКЭCPUПЩЖЈжЦПЩБрГЬПЩВСаДПЩжиЙЙЕФгХЪЦЃЌЪЕЯжвЛПюКЫаФВњЦЗЭЌЪБТњзуВЛЭЌаавЕгІгУЃЌЭЌРрВњЦЗжЎМфЕФВювьЛЏЩшМЦвдЬсИпОКељгХЪЦЁЃ ЁЁЁЁЖўЁЂЬиадНщЩмгыЩшМЦгІгУ ЁЁЁЁ? ЪЕЯжСЫИпадФмMCUФкКЫгыДѓШнСПFPGAЕФЮоЗьНсКЯ ЁЁЁЁФкКЌ192K Bytes ИпЫйSRAMгыЭтРЉDDR I/II/IIIФкДц,ВЂЭИЙ§PBUSзмЯпдкФкВПЯЮНгMCUЭтЩшгыFPGA,дкаХЯЂЛђШЁгыЪ§ОндЫЫужЎМфЭИЙ§FPGAзіЪЕЪБПьЫйДІРэ,ВЂНгајЕНMCUЕФИпЫйдЫЫу,ДяЕНМАЪБЕФПижЦвЊЧѓ ЁЁЁЁ? FPGAТпМЕЅдЊИпДя12K ЁЁЁЁ200 MHzзюДѓЦЕТЪ,ИпДя11520Иі4ЪфШыВщевБэЃЌ7680ИіDFFМФДцЦї,144ИіEMB5K(4.5KbitПЩХфжУЫЋЖЫПкDPRAMДцДЂЦї),ПЩвдГфЗжПЩжиИДБрГЬгВМў,ДѓШнСПИпЫйЖШгыЧПДѓжиаТБрГЬжиаТХфжУФмСІ,гааЇЫѕЖЬВњЦЗЩЯЪаЪБМфгыЙІФмаое§ ЁЁЁЁ? ИќИпЕШМЖДІРэЦї ЁЁЁЁ300 MHzзюДѓЦЕТЪЃЌ1.25 DMIPS/MHz(Dhrystone 2.1)адФм,ЕЅжмЦкГЫЗЈжИСюКЭгВМўГ§ЗЈжИСю,2ИіAHBжї/ДгзмЯпНгПк,ПЩвддкЯпЕїЪдФЃЪН,жЇГжДЎааЯпЕїЪдНгПк(SWD)КЭJTAGНгПк ЁЁЁЁжЇГжЧЖШыЪНTrace Macrocell?,ЁЏВЩгУЙўЗ№НсЙЙ,1.25DMIPS/MHzКЭ0.19Mw/MHz,Thumb-2жИСюМЏвд16ЮЛЕФДњТыУмЖШДјРДСЫ32ЮЛЕФадФм,ФкжУПьЫйЕФжеЖЫПижЦЦї,жаЖЯМфЕФбгГйЪБМфНЕЕНжЛаш6ИіCPUжмЦк,ДгЕЭЙІКФФЃЪНЛНабЕФЪБМфжЛаш6ИіCPUжмЦк,гыARM7TDMI?ЯрБШдЫааЫйЖШзюЖрПЩПь35%ЧвДњТызюЖрПЩНкЪЁ45% ЁЁЁЁ? 2Иі12ЮЛ1MSPS ADCФЃПщ ЁЁЁЁПЩГфЗжгІгУгкЛЗОГеьВт,ЖЏзїЮЛжУЖЈЮЛИажЊ,ДюХфгкFPGAЕФТпМЕЅдЊ,ПЩвдЪЕЯжВЛОгЩMCUМДПЩДяЕНгВМўдЫЫуаое§ЕФвЊЧѓ,ЪЕЯжЪЕЪБИпЫйдЫЫуПижЦвЊЧѓ ЁЁЁЁ? ЗсИЛЕФI/OзЪдДгыЗтзАЃЌвдгВКЫаЮЪНећКЯвдЬЋЭјЁЂUSBЁЂCANЁЂDMAПижЦЦївдМАDDRПижЦЦїЕШЭтЩш ЁЁЁЁПЩвдЭЌЪБжЇГжГЌЙ§80зщЫХЗўЕчЛњПижЦ,дЖГЌЙ§вЛАуMCUЕФПижЦМЋЯо,ШУУПЕЅдЊЖМЖРСЂдЫзї,ЭИЙ§вдЬЋЭјЁЂUSBЁЂCANЁЂ PCI,PCI-XПЩвдЪЕЯжЖдВЛЭЌФЃПщЕФЭЈбЖ,ЩѕжССЌНгМЦЫуЛњгыЭјТчЖМВЛЪЧЮЪЬт ЁЁЁЁ? ИпОЋЖШPLL МАЪБжгЭјТч ЁЁЁЁ4ИіPLLЃЌжЇГжБЖЦЕЁЂЗжЦЕЁЂЯрвЦЁЂde-skew,8ИіЭтВПЪБжгЪфШыЃЌ1ИіЭтВПОЇЬхЪБжгЪфШыЃЌ16Иіde-skewШЋОжЪБжгЃЌИпОЋЖШЕФИпЫйЪБжгдДПЩвдШУФкВПЪБжгПЩвдДяЕН300MHZЕФЮШЖЈдЫЫу ЁЁЁЁ? СщЛюЕФГЫМгЦїЪЕЯжDSP ЁЁЁЁЧЖШыЪНDSP ,- 48Иі18x18Лђ 96Иі12x9 DSP(MAC)ЃЌПЩвдзщКЯГЩИЁЕудЫЫуЦїЃЌЗсИЛЕФГЫРлМгЦїЖрДя32зщЃЌПЩвдШУдЫЫуИќМђНнбИЫйгыОЋШЗЃЌЛњЦїШЫПижЦдйвВВЛашвЊЖюЭтDSPаОЦЌМДПЩДяГЩ ЁЁЁЁ? ЛљгкEfuseКЭAESЕФБЃУмЛњжЦ ЁЁЁЁХфжУбЖЯЂЕФПЩМгУмЃЌФбЦЦНтЃЌШУЪЙгУепЕФПЦбаПЊЗЂГЩЙћЕУвдБЃГжгХЪЦЃЌНјЖјБЃГжВњЦЗМлжЕгХЪЦ ЁЁЁЁ? ГЌИпЯЕЭГадМлБШ ЁЁЁЁЛљгкИпЖШећКЯгкЕЅвЛаОЦЌ,гаадФмИп ЬхЛ§аЁ МлИёЕЭЕФГжајгХЪЦ ЁЁЁЁCME-M7ВњЦЗПЩгІгУдкЛњЦїШЫПижЦжаЫљашЕФКЫаФШчЙЄвЕПижЦЛњЦїШЫЁЂАВЗРМрПиЛњЦїШЫЁЂКЭМвОгЛњЦїШЫЕШСьгђЁЃШУЛњЦїШЫЙЄФмдкЩшМЦЩЯБфЕУИќМђЕЅгжЧПДѓЁЃ ЁЁЁЁШ§ЁЂCME-M7гВМўЩшМЦЗНАИзмГЩ ЁЁЁЁЛњЦїШЫзмЬхЙЙГЩ ЁЁЁЁШчЭМ1ЫљЪОЃЌвдCME-M7ЮЂДІРэЦїЮЊКЫаФЃЌНгЪмДЋИаЦїДЋРДЭтВПаХЯЂЃЌНјааДІРэЃЌПижЦЛњЦїШЫЕФдЫааЁЃ ЁЁЁЁ 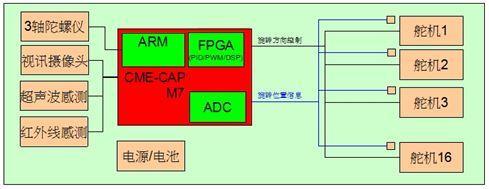 ЁЁЁЁЭМ1 ЛњЦїШЫзмЬхЙЙГЩ ЁЁЁЁШЫаЭЛњЦїШЫЕФећЬхЙцЛЎ ЁЁЁЁШЫаЮЛњЦїШЫЪЧвЛжжжЧФмЛЏЛњЦїШЫЃЌдкЛњЦїЕФИїЛюЖЏЙиНкХфжУгаЖрДя16ИіЗўЮёЦїЃЌОпга16ИіздгЩЖШЃЌЬиЯдСщЛюЃЌИќФмЭъГЩжюШчЪжБлКѓАк90ЖШЕФИпФбЖШЖЏзїЁЃЫќЛЙХфвЛЬзЩшМЦгХСМЕФПижЦЯЕЭГЃЌЭЈЙ§здЩэжЧФмБрГЬШэМўБуФмздЖЏЕиЭъГЩећЬзЖЏзїЁЃ ЁЁЁЁ  ЁЁЁЁЯЕЭГЕчдДЙЉЕчВПЗж ЁЁЁЁгЩгкЛњЦїШЫЕчЛњЃЌДЋИаЦїМАЯЕЭГВЩгУ+5VЙЉЕчЃЌCPUВЩгУcore 1V & I/O 3.3VЙЉЕч,ЕчдДВПЗжОљПМаыТЧЕчЛњЙІТЪКЭећЬхжЪСПМАФІВСзшСІЮЪЬтЃЌЕчдДЮвУЧВЩгУяЎЕчГизщДЎСЊгыЭЌВННЕбЙДІРэЃЌЙІКФаЁЁЂЬхЛ§аЁКЭжЪСПЧсЃЌАВзАНЯЮЊЗНБуЁЃ ЁЁЁЁЕчЛњЧ§ЖЏМАPWMЕїЫйВПЗж ЁЁЁЁЛњЦїШЫашПижЦдквЛИіКЯЪЪЕФЫйЖШдЫааЃЌЫйЖШПьЃЌвђMCUЖдИїДЋИаЦїДЋРДЕФаХКХгавЛИіЯьгІЁЂДІРэЪБМфЃЌаЁГЕМЋвзЦЋРыЙьЕР,ДЫЪБашвЊДюХфFPGAЕчТЗРДЪЕЯжЪЕЪБдЫЫуДІРэКѓдйЬсЙЉИјMCUЁЃЫХЗўЕФЫйЖШЪЧгЩжБСїЕчЛњзЊЫйПижЦ,ОгЩМЖСЊМѕЫйГнТжНјааНЕЫйКѓЕУЕНа§зЊгыИќДѓХЄСІЃЌИФБфЫХЗўГнТжЕФПижЦНЧЖШЭЈГЃВЩгУЕїТіПэЁЂЕїбЙЁЂЕїДХЕШЗНЪНРДЪЕЯжЁЃЦфжаЃЌЕїбЙЗНЪНдРэМђЕЅЃЌЕЋашвЊФЃФтЪфГі, ЕїТіПэЗНЪНашвЊFPGAТпМДюГЩPWMПижЦФЃПщ,дкCME-M7ШнвзЪЕЯжЁЃ ЁЁЁЁПЩвдЪЙгУFPGAЁЂФЃФтЕчТЗЁЂЕЅЦЌЛњРДВњЩњЖцЛњЕФПижЦаХКХЃЌFPGAШнвзЩњГЩЮШЖЈЧвПьЫйЕФТіПэЕїжЦаХКХЕФТіПэБфЛЛВњЩњ50Hz(жмЦкЪЧ20ms)ЕФаХКХЃЌЕЋаызЂвтдЫЗХЦїМўЕФбЁдёгаНЯИпвЊЧѓЁЃ ЁЁЁЁШєжЛгУЕЅЦЌЛњзїЮЊЖцЛњЕФПижЦЕЅдЊЃЌЪЙPWMаХКХЕФТіГхПэЖШЪЕЯжЮЂУыМЖЕФБфЛЏЃЌДгЖјЬсИпЖцЛњЕФзЊНЧОЋЖШЁЃЕЅЦЌЛњЭъГЩПижЦЫуЗЈЃЌдйНЋМЦЫуНсЙћзЊЛЏЮЊ PWMаХКХЪфГіЕНЖцЛњЃЌДЫЪБЛсвђЮЊЕЅЦЌЛњЕФжИСюжмЦкВЛЭЌгыГЬађдЫааМфИєВЛЭЌЖјгаВЛзМШЗад,ЙЪВЩгУCME-M7 FPGA PWMРДжБНгПижЦ,ЪЧвЛИіЪ§зжЯЕЭГЃЌЦфПижЦаХКХЕФБфЛЏЭъШЋвРППгВМўМЦЪ§ЃЌЫљвдЪмЭтНчИЩШХНЯаЁЃЌећИіЯЕЭГЙЄзїПЩПП,дйгЩMCUЯТДяВЮЪ§ИјFPGAНјааЫХЗўЕФНЧЖШЩшжУЁЃ ЁЁЁЁ 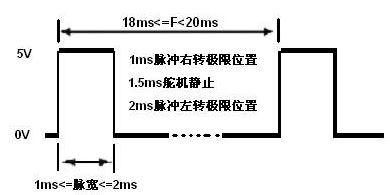 ЁЁЁЁЭМЪОЃКЖцЛњЕФПижЦвЊЧѓ ЁЁЁЁЖцЛњЪЧвЛжжЮЛжУЫХЗўЕФЧ§ЖЏЦїЃЌЪЪгУгкашвЊНЧЖШВЛЖЯБфЛЏВЂПЩвдБЃГжЕФПижЦЯЕЭГЁЃЖцЛњЕФПижЦаХКХЪЧPWMаХКХЃЌРћгУеМПеБШЕФБфЛЏИФБфЖцЛњЕФЮЛжУЁЃ ЁЁЁЁЕБПижЦаХКХгЩЪфШыРТЯпНјШыаХКХЕїжЦаОЦЌЃЌЛёЕУжБСїЦЋжУЕчбЙЁЃЫќФкВПгавЛИіЛљзМЕчТЗЃЌВњЩњжмЦкЮЊ20msЃЌПэЖШЮЊ1.5msЕФЛљзМаХКХЃЌНЋЛёЕУЕФжБСїЦЋжУЕчбЙгыЕчЮЛЦїЕФЕчбЙБШНЯЃЌЛёЕУЕчбЙВюЪфГіЁЃзюКѓЃЌЕчбЙВюЕФе§ИКЪфГіЕНЕчЛњЧ§ЖЏаОЦЌОіЖЈЕчЛњЕФе§ЗДзЊЕчТЗЁЃЕБЕчЛњЮЛжУгыЖЈЮЛЦїВЛвЛжТЪБ,ЕчЛњЧ§ЖЏаОЦЌЕФе§ЗДзЊЕчТЗЪфГіе§ЗДзЊбЖКХЧ§ЖЏЕчЛњЃЌЭЈЙ§МЖСЊМѕЫйГнТжДјЖЏЕчЮЛЦїа§зЊЃЌЪЙЕУЕчбЙВюЮЊ0ЃЌЕчЛњЭЃжЙзЊЖЏЁЃ ЁЁЁЁЖцЛњФкАВзАСЫвЛИіЕчЮЛЦї(ЛђЦфЫќНЧЖШДЋИаЦї)МьВтЪфГіжсзЊЖЏНЧЖШЃЌПижЦАхИљОнЕчЮЛЦїЕФаХЯЂФмБШНЯОЋШЗЕФПижЦКЭБЃГжЪфГіжсЕФНЧЖШЁЃ ЁЁЁЁЖцЛњЕФжїЬхНсЙЙШчЯТЭМЫљЪОЃЌжївЊгаМИИіВПЗжЃКЭтПЧЁЂМѕЫйГнТжзщЁЂЕчЛњЁЂЕчЮЛЦїЁЂПижЦЕчТЗЁЃ ЁЁЁЁМђЕЅЕФЙЄзїдРэЪЧПижЦЕчТЗНгЪеаХКХдДЕФПижЦаХКХЃЌВЂЧ§ЖЏЕчЛњзЊЖЏ;ГнТжзщНЋЕчЛњЕФЫйЖШГЩДѓБЖЪ§ЫѕаЁЃЌВЂНЋЕчЛњЕФЪфГіХЄОиЗХДѓЯьгІБЖЪ§ЃЌШЛКѓЪфГі;ЕчЮЛЦїКЭГнТжзщЕФФЉМЖвЛЦ№зЊЖЏЃЌВтСПЖцЛњжсзЊЖЏНЧЖШ;ЕчТЗАхМьВтВЂИљОнЕчЮЛЦїХаЖЯЖцЛњзЊЖЏНЧЖШЃЌШЛКѓПижЦЖцЛњзЊЖЏЕНФПБъНЧЖШЛђБЃГждкФПБъНЧЖШЁЃ ЁЁЁЁ  ЁЁЁЁ 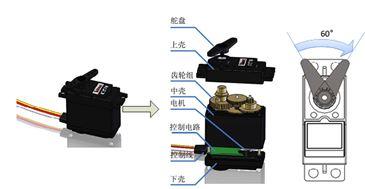 ЁЁЁЁЖцЛњЪЧвЛИіЮЂаЭЕФЫХЗўПижЦЯЕЭГЃЌОпЬхЕФПижЦдРэПЩвдгУЯТЭМБэЪОЃК ЁЁЁЁ 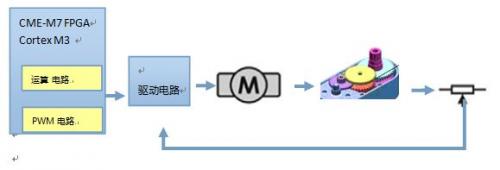 ЁЁЁЁЙЄзїдРэЪЧПижЦЕчТЗНгЪеаХКХдДЕФПижЦТіГхЃЌВЂЧ§ЖЏЕчЛњзЊЖЏ;ГнТжзщНЋЕчЛњЕФЫйЖШГЩДѓБЖЪ§ЫѕаЁЃЌВЂНЋЕчЛњЕФЪфГіХЄОиЗХДѓЯьгІБЖЪ§ЃЌШЛКѓЪфГі;ЕчЮЛЦїКЭГнТжзщЕФФЉМЖвЛЦ№зЊЖЏЃЌВтСПЖцЛњжсзЊЖЏНЧЖШ;ЕчТЗАхМьВтВЂИљОнЕчЮЛЦїХаЖЯЖцЛњзЊЖЏНЧЖШЃЌШЛКѓПижЦЖцЛњзЊЖЏЕНФПБъНЧЖШЛђБЃГждкФПБъНЧЖШЁЃ ЁЁЁЁЖцЛњЕФПижЦТіГхжмЦк20msЃЌТіПэДг0.5ms-2.5msЃЌЗжБ№ЖдгІ-90ЖШЕН+90ЖШЕФЮЛжУЁЃШчЯТЭМЫљЪОЃК ЁЁЁЁ  ЁЁЁЁРћгУCME-M7ИпадФмгВМўЪЕЯжЛњЦїШЫЕФЖЏЬЌЦНКт,Ш§жсДЋИаЦїЛёЕУЕФзЫЬЌзЪСЯОЙ§ЕФFPGAгыDSPжБНгдЫЫуКѓ,ДЋЕнИјPWMЩњГЩПижЦбЖКХ,п_ГЩМДrПижЦвЊЧѓЁЃ ЁЁЁЁ  |
ЭјгбЦРТл