
ЛљгкATmega162ЕФжИЮЦЪЖБ№ЕчзгЛњаЕЫјЩшМЦ
ЗЂВМЪБМфЃК2015-11-9 14:44
ЗЂВМепЃКdesignapp
|
ЁЁЁЁ0 в§бд ЁЁЁЁЫцзХЩњЛюЫЎЦНЕФЬсИпЃЌШЫУЧЖдЮяжЪЩњЛюЕФвЊЧѓдНРДдНИпЃЌгШЮЊзЂжизЁеЌАВШЋЮЪЬтЁЃЫцзХЩњЮяЬиеїЪЖБ№ММЪѕЕФЗЂеЙЃЌжИЮЦЪЖБ№ММЪѕж№НЅНјШыШЫУЧЕФЩњЛюСьгђЃЌжИЮЦЫјНјШыСЫШЫУЧЕФМвЭЅЁЃГЃМћЕФжИЮЦЫјЃЌашвЊЙмРэдБжИЮЦЛђепЙмРэдБУмТыЃЌВХФмНјаажИЮЦКЭУмТыЕФЬэМгКЭЩОГ§ВйзїЁЃБОЮФЩшМЦЕФЕчзгЛњаЕЫјЃЌОпгаЩЯЪіЙІФмЃЌЛЙПЩвдгУе§ШЗдПГзЙмРэжИЮЦКЭУмТыЁЃ ЁЁЁЁГЃМћЕФжИЮЦЫјХфБИЕФЛњаЕЫјЃЌПЩЪЙгУЦеЭЈЕФе§ШЗдПГзДђПЊЃЌАВШЋМЖБ№НЯЕЭЃЌКмШнвзБЛзЈвЕШЫдБЦЦНтЁЃБОЮФЩшМЦЕФЛљгкPIC16F72ЕФЛњаЕЫјЃЌХфЬзЕФдПГзФкжУБрТыаОЦЌЃЌФмЙЛЩшжУе§ШЗдПГзвдМАЗЂЫЭдПГзБрТыаХЯЂЃЌжЛгагУе§ШЗдПГзВХФмДђПЊЃЌВЛФмБЛЬњЫПЛђЦфЫћЗЧЗЈдПГзДђПЊЃЌАВШЋадДѓДѓЬсИпЁЃдкЗЧЗЈПЊУХЕФЧщПіЯТЃЌЛњаЕЫјЗЂЫЭБЈОЏаХЯЂЁЃ ЁЁЁЁ1 ЯЕЭГЩшМЦЗНАИ ЁЁЁЁЕчзгЛњаЕЫјЃЌЗжЮЊЕчзгЫјКЭЛњаЕЫјетСНИіВПЗжЁЃЕчзгЫјвдЕЅЦЌЛњATmega162ЮЊКЫаФЃЌЭЈЙ§жИЮЦЪЖБ№ФЃПщЃЌЭъГЩСЫЖджИЮЦЙмРэЕФВйзї;ЭЈЙ§МќХЬЃЌЭъГЩУмТыЙмРэЕФВйзї;ЭЈЙ§ГЌЭтВюНгЪеФЃПщЃЌФмЙЛНгЪеРДздЛњаЕЫјЕФдПГзБрТыаХЯЂЃЌЭъГЩгыЛњаЕЫјЕФЭЈаХЁЃ ЁЁЁЁЛњаЕЫјвдPICЕЅЦЌЛњPIC16F72ЮЊКЫаФЃЌЛёШЁдПГзБрТыаХЯЂЃЌОГЌЭтВюЗЂЫЭФЃПщЗЂЫЭЁЃГЌЭтВюЗЂЫЭКЭНгЪеФЃПщЕФЙЄзїЦЕТЪдк433 MHzЃЌPCBВМЯпЪБзЂвтГЌЭтВюФЃПщЃЌдЖРыЦфЫћЦїМўЃЌВЛШЛЛсгАЯьЯЕЭГЕФЙЄзїзДЬЌЁЃСэЭтЃЌИУЯЕЭГвЊЧѓЬхЛ§аЁЃЌЙЉЕчЗНБуЃЌећИіЯЕЭГЕФЙІКФвЊОЁСПЕЭЁЃ ЁЁЁЁ1.1 ЕчзгЫјПђЭМ ЁЁЁЁЕчзгЫјжїЬхЮЊAVRЕЅЦЌЛњATmega162ЁЂжИЮЦЪЖБ№ФЃПщЁЂГЌЭтВюНгЪеФЃПщЁЂ12 VЕчзгЫјЧ§ЖЏЁЂУХЫјЁЂМќХЬЁЂАДМќКЭжИЪОЕЦЕШЃЌШчЭМ1ЫљЪОЁЃжИЮЦЪЖБ№ФЃПщаЭКХЮЊЃКTFS-M12ЃЌВЩгУTIЕФDSPаОЦЌTMS320VC5501ЃЌжИЮЦЫуЗЈВЩгУTFS-9ЁЃЮШЖЈПьЫйЕФаОЦЌвдМАгХСМЕФжИЮЦЫуЗЈЃЌВЛНіЬсИпСЫећИіЯЕЭГЕФЪЖБ№ТЪвдМАЫѕЖЬСЫЪЖБ№ЪБМфЃЌЖјЧвДѓДѓЫѕЖЬСЫећИіЯЕЭГЕФбаЗЂЪБМфЁЃ ЁЁЁЁ 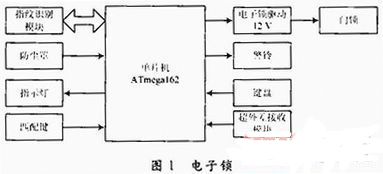 ЁЁЁЁЕчзгЫјдкВЛЪЙгУЕФЪБКђЃЌДІгкЫЏУпзДЬЌЁЃгУЛЇДђПЊжИЮЦЪЖБ№ФЃПщЩЯЕФН№ЪєЗРГОежЪБЃЌВњЩњЛНабаХКХЃЌЕчзгЫјНјШые§ГЃЙЄзїзДЬЌЁЃ ЁЁЁЁе§ГЃЙЄзїзДЬЌЯТЃЌЕчзгЫјжЇГжСНжжПЊУХЗНЪНЃКжИЮЦПЊУХКЭЪфШыУмТыПЊУХЁЃжИЮЦВЩМЏЭЗЩЯЪфШыжИЮЦЃЌжИЮЦЪЖБ№ФЃПщНЋЕБЧАжИЮЦгывбДцжИЮЦНјааБШНЯЃЌЕЅЦЌЛњATmega162НгЪеЕНБШНЯНсЙћЃЌШєе§ШЗВњЩњПЊУХаХКХЃЌО12 VЕчзгЫјЧ§ЖЏЃЌДђПЊУХЫјЁЃМќХЬЪфШыУмТыЃЌЕЅЦЌЛњATmega162НЋЕБЧАЪфШыУмТыКЭгУЛЇЩшжУЕФе§ШЗУмТыНјааБШНЯЃЌШєе§ШЗВњЩњПЊУХаХКХЃЌО12 VЕчзгЫјЧ§ЖЏЃЌДђПЊУХЫјЁЃЪфШыжИЮЦКЭУмТыЕФЛњЛсЙВ3ДЮЃЌШє3ДЮЖМДэЮѓЃЌЯЕЭГНјШыЫЏУпзДЬЌЁЃ ЁЁЁЁ1.2 ЛњаЕЫјПђЭМ ЁЁЁЁЛњаЕЫјжїЬхЮЊPICЕЅЦЌЛњPIC16F72ЁЂГЌЭтВюЗЂЫЭФЃПщЁЂЩшжУМќЁЂжИЪОЕЦЕШЃЌШчЭМ2ЫљЪОЁЃЩшжУе§ШЗдПГзВНжшЃКАДЯТЩшжУМќЃЌжИЪОЕЦГЃССЃЌВхШыашвЊЩшжУЕФдПГзЃЌЕШД§жИЪОЕЦгаЙцТЩЕФЩСЫИ3ЯТЃЌЩшжУГЩЙІ;ЩшжУЭъГЩКѓгУе§ШЗдПГзПЊУХ1ДЮЃЌЛжИДе§ГЃЪЙгУзДЬЌЁЃЕБВхШыДэЮѓдПГзЛђепЪЧЬњЫПЕШЗЧЗЈдПГзЪБЃЌжИЪОЕЦЛсПьЫйЩСЫИЃЌВЂЭЈЙ§ГЌЭтВюЗЂЫЭФЃПщЗЂЫЭБЈОЏаХЯЂЁЃ ЁЁЁЁ 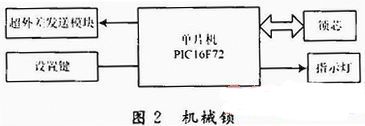 ЁЁЁЁЮЊСЫНЕЕЭећИіЯЕЭГЕФЙІКФЃЌЛњаЕЫјдкВЛЪЙгУЪБЃЌДІгкВЛЙЄзїзДЬЌЁЃдкАВзАЛњаЕЫјЕФЪБКђЃЌЛсдкЛњаЕЫјЕФЫјаОАВзАвЛИіН№ЪєзЊНгПкЃЌИУН№ЪєзЊНгПкСЌНгСЫЕчзгЫјЕФЗРГОежЃЌзЊЖЏН№ЪєзЊНгПкЃЌВЛНіИјЛњаЕЫјЙЉЕчЪЙжЎНјШые§ГЃЙЄзїзДЬЌЃЌЛЙЛНабЕчзгЫјЃЌШУЕчзгЫјНјШые§ГЃЙЄзїзДЬЌЁЃзЊЖЏН№ЪєзЊНгПкЃЌЛЙЪЙЕУЕчзгЫјжаЕФЕЅЦЌЛњATmega162Ек4ПкЕФЕк5ЮЛ(МДP4.5)БфГЩИпЕчЦНЃЌЕчзгЫјжЛДІРэРДздЛњаЕЫјЗЂГіЕФаХЯЂЁЃ ЁЁЁЁЛњаЕЫје§ГЃЙЄзїзДЬЌЪБЃЌВхШыдПГзЃЌЕЅЦЌЛњPIC16F72ЛсЪЖБ№дПГзЕФБрТыЃЌШєе§ШЗЃЌдђДђПЊЫјаОЩЯЕФЗЇЃЌПЩвдзЊЖЏдПГзПЊУХЃЌШєДэЮѓдђЗЂЫЭДэЮѓдПГзаХЯЂЃЌЫјаОЕФЗЇвРОЩЙиБеЃЌВЛФмПЊУХЃЌДгЖјБЃжЄСЫЃЌгУЛЇЕФАВШЋЁЃ ЁЁЁЁ1.3 ЕчзгЫјКЭЛњаЕЫјЕФЭЈаХ ЁЁЁЁЕчзгЫјКЭЛњаЕЫјжЎМфЕФЭЈаХЪЧЭЈЙ§ГЌЭтВюЗЂЫЭКЭНгЪеФЃПщЭъГЩЁЃЛњаЕЫјЗЂЫЭШчЭМ3ЫљЪОЕФаХЯЂЃЌУПЮЛЪ§ОнПэЖШЮЊ1 msЁЃгЩгкдыЩљЕФгАЯьЃЌЕЅЦЌЛњATmega162жЛФмЭЈЙ§ВщбЏЗНЪННгЪеЁЃ ЁЁЁЁ 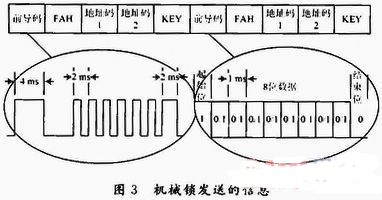 ЁЁЁЁЧАЕМТыЪЧгЩ23ЮЛЪ§ОнзщГЩЁЃЪ§ОнТыгЩFAHТыЁЂЕижЗТывдМАKEYТызщГЩЃЌУПИіЪ§ОнТыга10ЮЛЃЌЗжБ№гЩ8ЮЛЪ§ОнЁЂЦ№ЪМЮЛ(1)КЭНсЪјЮЛ(0)зщГЩЁЃ ЁЁЁЁЕижЗТыОЭЪЧЛњаЕЫјЕФЪЖБ№ТыЃЌЪЖБ№ТыЪЧЮЉвЛЕФЃЌУПДЮЖСШЁKEYТыЃЌЖМЛсНЋЕБЧАЕижЗТыКЭДцДЂЕФЕижЗТыНјааБШНЯЃЌШєЯрЭЌВХФмЖСШЁKEYТыЃЌвђДЫВЛЛсНгЪеРДздЦфЫћгУЛЇЕФЫјЗЂГіЕФаХЯЂЁЃ ЁЁЁЁKEYТыОЭЪЧдПГзЕФБрТыЃЌУПИідПГзЕФБрТыЪЧЮЉвЛЕФЃЌвђДЫПЩвдМЧТМгУЛЇМвЭЅГЩдБЕФПЊУХаХЯЂЃЌЗНБугУЛЇВщбЏЁЃЕчзгЛњаЕЫјгІгУдкАьЙЋГЁКЯЪБЃЌШєЗЂЩњЭЕЧдЧщПіЃЌПЩвдВщбЏзюНќЕФПЊУХаХЯЂЃЌРДШЗЖЈЛГвЩЖдЯѓ;вВПЩвдВщбЏЬиЪтдПГзПЊУХЧщПіЃЌБШШчБЃФЗЙЄзїЕФОпЬхЪБМфЁЃШєЗЂЩњЗЧЗЈПЊУХЪБЃЌKEYТыЮЊ0x00ЃЌНгЪеЕНИУKEYТыЪБЃЌВњЩњБЈОЏаХКХЁЃ ЁЁЁЁ2 жИЮЦЪЖБ№ЫуЗЈдРэ ЁЁЁЁ2.1 жИЮЦЪЖБ№ЫуЗЈ ЁЁЁЁжИЮЦЪЖБ№ЗжЮЊвдЯТ4ИіВНжшШчЭМ4ЫљЪОЁЃ ЁЁЁЁ 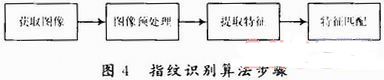 ЁЁЁЁжИЮЦЭМЯёдЄДІРэЪЧзюживЊЕФвЛВНЃЌЙиЯЕЕНКѓУцЬсШЁЕФЬиеїЕуЕФе§ШЗгыЗёЁЃ ЁЁЁЁгЩгкжИЮЦВЩМЏЩшБИЕФВЛЭъЩЦадЃЌЖдгкИЩЁЂЪЊЁЂдрЁЂРЯЛЏЁЂФЅЫ№ЕФжИЮЦЃЌЭљЭљФбвдВЩМЏЕНЧхЮњЕФЭМЯёЃЌвђДЫашвЊЭМЯёдіЧПЃЌЪЧжИЮЦЭМЯёдЄДІРэжаживЊЕФвЛВНЃЌВЩгУGaborТЫВЈЭъГЩЁЃИљОнжИЮЦЭМЯёОжВПЧјгђЕФЮЦЯпЗжВМОпгаНЯЮШЖЈЕФЗНЯђКЭЦЕТЪЃЌЩшМЦЯргІЕФGaborДјЭЈТЫВЈЦїЃЌФмгааЇЕидкОжВПЧјгђЖджИЮЦНјаааое§КЭТЫдыЁЃGaborКЏЪ§ЪЧЮЉвЛФмДяЕНЪБЦЕВтВЛзМЙиЯЕЯТНчЕФКЏЪ§ЃЌЖўЮЌБэДяЪНЮЊЃК ЁЁЁЁ  ЁЁЁЁGaborКЏЪ§ЪЧЖўЮЌИпЫЙКЏЪ§дкПеМфЦЕТЪгђЕФЦНвЦКЏЪ§ЃЌІвxЃЌІвyЮЊЖдгІгкxЗНЯђКЭyЗНЯђЕФНЧЦЕТЪЦНвЦВЮЪ§ЁЃЖўЮЌGaborКЏЪ§ЕФЪЕВПКЭащВППЩИїздБэЪОЮЊвЛИіКЏЪ§ЃЌЗжБ№ГЦЮЊХМGahorКЭЦцGaborКЏЪ§ЁЃХМGahorКЏЪ§ЪЪгкдіЧПФПБъЮяЬхЃЌЖјЦцGaborКЏЪ§ЪЪгкдіЧПЮяЬхБпдЕЁЃ ЁЁЁЁGaborТЫВЈЦїЯЕЪ§ЗжСПЮЊЃК ЁЁЁЁ  ЁЁЁЁЪНжаЃКx=mcosІе+nsinІе;y=-msinІе+ncosІе;(iЃЌj)ЮЊЕБЧАЕуЕФзјБъЃЌІеЮЊЕБЧАЕу(Пщ)ЕФЗНЯђЃЌfЮЊЕБЧАПщ(ећЬх)ЕФе§ЯвЦНУцВЈЕФЦЕТЪ;(mЃЌn)ШЁжЕЗЖЮЇгыжИЮЦЭМЯёЕФзјБъ(iЃЌj)ШЁжЕЗЖЮЇЯрЭЌЁЃІвxЃЌІвyдіДѓЃЌЖддыЩљЕФЪЪгІФмСІдіЧПЃЌЕЋгаПЩФмЛсВњЩњЮБЮЦЯп;МѕаЁЃЌЯћГ§дыЩљЕФзїгУМѕШѕЁЃ ЁЁЁЁЖдгкУПвЛЕуЃЌИљОнЦфЗНЯђЁЂЦЕТЪЃЌЧѓГіGaborТЫВЈЦїЯЕЪ§ЃЌШЛКѓИљОнЪН(3)МЦЫуЕБЧАЕуТЫВЈКѓЕФжЕЃК ЁЁЁЁ  ЁЁЁЁДгЭМ5ПЩКмУїЯдЕиПДГіЃЌОЙ§GaborТЫВЈДІРэКѓЃЌЭМЯёЖдБШдіЧПЃЌЮЦРэЧхЮњЃЌЬиеїУїЯдЃЌЬсИпСЫКѓајЬсШЁжИЮЦЬиеїЕуЕФе§ШЗТЪЁЃ ЁЁЁЁ  ЁЁЁЁ2.2 жИЮЦЪЖБ№ФЃПщЕФЭЈаХавщ ЁЁЁЁжИЮЦЪЖБ№ФЃПщзїЮЊДгЩшБИЃЌЭЈЙ§ДЎПкЃЌгЩжїаОЦЌATmega162ЗЂЫЭЯрЙиУќСюЖдЦфНјааПижЦЁЃ ЁЁЁЁУќСюНгПкЃК19200b/s 1Ц№ЪМЮЛ1ЭЃжЙЮЛ(ЮоаЃбщЮЛ)ЁЃ ЁЁЁЁжїаОЦЌЗЂЫЭЕФУќСюМАжИЮЦФЃПщЕФгІД№Ъ§ОнГЄЖШЮЊ8 BЃЌЪ§ОнИёЪНШчЯТЃК ЁЁЁЁ 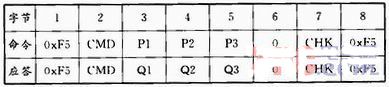 ЁЁЁЁCMDЃКУќСю/гІД№РраЭ  1.P2ЃЌP3ЃКУќСюВЮЪ§;Q1ЃЌQ2ЃЌQ3ЃКгІД№ВЮЪ§;CHKЃКаЃбщКЭЃЌЮЊЕк2зжНкЕНЕк6зжНкЕФвьЛђжЕ;Q3гУгкЗЕЛиВйзїЕФгааЇадаХЯЂЃЌБэЪОВйзїЪЧЗёГЩЙІЃЌЪ§ОнЪЧЗёДцдкЃЌВЩМЏжИЮЦГЌЪБЕШЁЃ 1.P2ЃЌP3ЃКУќСюВЮЪ§;Q1ЃЌQ2ЃЌQ3ЃКгІД№ВЮЪ§;CHKЃКаЃбщКЭЃЌЮЊЕк2зжНкЕНЕк6зжНкЕФвьЛђжЕ;Q3гУгкЗЕЛиВйзїЕФгааЇадаХЯЂЃЌБэЪОВйзїЪЧЗёГЩЙІЃЌЪ§ОнЪЧЗёДцдкЃЌВЩМЏжИЮЦГЌЪБЕШЁЃЁЁЁЁ3 ГЬађЩшМЦ ЁЁЁЁЯЕЭГДгЫЏУпзДЬЌЦєЖЏЪБЃЌЪзЯШНјааЯЕЭГГѕЪМЛЏЃЌШЛКѓНјШые§ГЃЙЄзїзДЬЌЃЌШчЭМ6ЫљЪОЁЃ ЁЁЁЁ 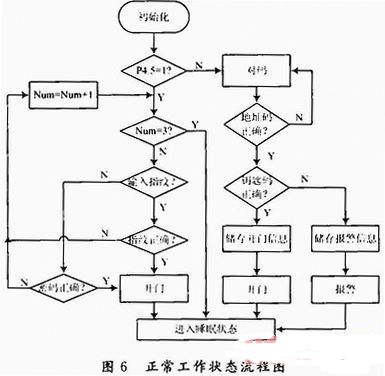 ЁЁЁЁзЊЖЏЛњаЕЫјЩЯЕФН№ЪєзЊНгПкЛсИФБфЕЅЦЌЛњATmega162ЕФP4.5ЕФзДЬЌЁЃПЊЦєН№ЪєзЊНгПкЃЌЕЅЦЌЛњATmega162ДІРэРДздЛњаЕЫјЗЂЫЭЕФаХЯЂ;ЙиБеН№ЪєзЊНгПкЃЌЕЅЦЌЛњATmega162ДІРэРДздЕчзгЫјЩЯжИЮЦЪЖБ№ФЃПщЛђМќХЬЕФаХЯЂЁЃ ЁЁЁЁЯЕЭГЛЙПЊЦєСЫСНИіжаЖЯЃКЩшжУжаЖЯКЭЦЅХфжаЖЯЁЃЦЅХфжаЖЯОЭЪЧЕчзгЫјКЭжИЖЈЕФЛњаЕЫјНјааЦЅХфЃЌжЛНгЪеРДзджИЖЈЕФЛњаЕЫјЗЂГіЕФаХЯЂ;ЩшжУжаЖЯОЭЪЧжИЮЦКЭУмТыЕФЙмРэЁЃ ЁЁЁЁ3.1 ЦЅХфжаЖЯ ЁЁЁЁЦЅХфжаЖЯЪЧСДНгЖрЬиеїЕчзгЛњаЕЫјСНИіВПЗжЕФЧАЬсЃЌГѕДЮАВзАЕчзгЛњаЕЫјБиаыНјааЦЅХфжаЖЯЁЃдкПЊЦєИУжаЖЯЧАЃЌБиаыУЛжУКУе§ШЗдПГзЁЃЦЅХфжаЖЯЮЊЭтВПжаЖЯЃЌЭЈЙ§АДЯТПижЦЯЕЭГФЃПщЩЯЕФЦЅХфМќЃЌНјШыЦЅХфжаЖЯШчЭМ7ЫљЪОЁЃ ЁЁЁЁ 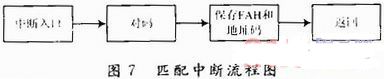 ЁЁЁЁ3.2 ЩшжУжаЖЯ ЁЁЁЁЩшжУжаЖЯЗжЮЊСНжжФЃЪНЃКЦеЭЈФЃЪНКЭЬиЪтФЃЪНЁЃЬиЪтФЃЪНОЭЪЧРћгУе§ШЗдПГзЙмРэжИЮЦКЭУмТыЃЌШчЭМ8ЫљЪОЁЃ ЁЁЁЁ  ЁЁЁЁЖрЬиеїЕчзгЛњаЕЫјЬэМгСЫдПГзЙмРэжИЮЦКЭУмТыЕФЙІФмЃЌФПЧАЕФжИЮЦЫјВЂВЛОпБИИУЙІФмЁЃЕБУЛгаЙмРэдБжИЮЦЃЌЖјУмТыЭќМЧЕФЧщПіЯТЃЌИУЫјПЩвдгУе§ШЗдПГзНјаажИЮЦКЭУмТыЕФЬэМгКЭЩОГ§ЃЌИјгУЛЇДјРДСЫЗНБуЁЃ ЁЁЁЁ4 ЪЕбщНсЙћгыЗжЮі ЁЁЁЁГЌЭтВюЗЂЫЭКЭНгЪеФЃПщжЎМфЕФЭЈаХЃЌгЩгкЭтНчдыЩљКЭЯЕЭГБОЩэЕФгАЯьЃЌВЛЪЧУПДЮЖМФмНгЪеЕНШчЭМ3ЕФаХЯЂЃЌПЩФмЛсГіЯжЭЈаХДэЮѓЕФЧщПіЃЌЮЊДЫНјааПЩППадВтЪдЪЕбщЁЃ ЁЁЁЁгУЪОВЈЦїОЋШЗВтСПГЌЭтВюНгЪеФЃПщЩЯЕФВЈаЮЕФЪБађЃЌЕїећДњТыЃЌЪЙеьВтЕуТфдкИпЕчЦНЕФжаМф;заЯИМЦЫубгЪБКЏЪ§ЃЌШЗБЃЪБМфЕФзМШЗадЁЃдкЪЕМЪЕїЪдЙ§ГЬжаЃЌНјааСЫ5зщЕФЪЕбщЃЌУПзщЕФВтЪдЬѕМўЖМВЛЭЌЃЌШчЮТЖШЁЂЛЗОГдыЩљЕШЃЌУПзщВтЪд100ДЮЃЌЙВМЦ500ДЮЕФВтЪдЃЌжЛГіЯжСЫ2ДЮУЛгае§ШЗЪЖБ№дПГзЕФЧщПіЃЌПЩППадДяЕН99.6%ЃЌОпгаЪЕМЪгІгУМлжЕЁЃ ЁЁЁЁ5 Нсгя ЁЁЁЁБОЮФЩшМЦЕФЕчзгЛњаЕЫјЃЌЧЩУюРћгУГЌЭтВюЗЂЫЭКЭНгЪеФЃПщЃЌАбСНИіЯрЖдЖРСЂЕФВПЗжСДНгЦ№РДЁЃећИіЯЕЭГвдЕЅЦЌЛњATmega162ЮЊКЫаФЃЌжБНгПижЦжИЮЦЪЖБ№ФЃПщКЭМќХЬЃЌВЂЭЈЙ§ГЌЭтВюЗЂЫЭКЭНгЪеФЃПщЃЌМфНгПижЦЛњаЕЫјВПЗжЁЃЖрЬиеїЕчзгЛњаЕЫјВЛНіПЩвдгУЙмРэдБжИЮЦКЭУмТыЙмРэгУЛЇаХЯЂЃЌЛЙПЩвдЪЙгУе§ШЗдПГзЙмРэгУЛЇаХЯЂЃЌФПЧАЪаГЁЩЯЛЙУЛгаОпБИИУЙІФмЕФЫјГіЯжЁЃИУЫјЙІФмЧПДѓЃЌИјгУЛЇДјРДСЫЗНБуКЭПьНнЕФЭЌЪБЃЌАВШЋадвВЕУЕНДѓДѓЬсИпЁЃ |
ЭјгбЦРТл