
ЛљгкAT89S52ЕФЗРзВаЁГЕЯЕЭГЩшМЦ
ЗЂВМЪБМфЃК2015-10-30 10:43
ЗЂВМепЃКdesignapp
ЙиМќДЪЃК
AT89S52 , аХКХДІРэЦї
|
ЁЁЁЁ1 в§бд ЁЁЁЁГЌЩљВЈДЋИаЦївђЦфВтСПОЋЖШИпЁЂ ЯьгІПьКЭМлИёЕЭСЎЖјЕУЕНСЫЙуЗКгІгУЃЌДЋЭГгІгУЗНЪНЪЧ1 ИіЗЂЩфЭЗЖдгІ1 ИіНгЪеЭЗ ЃЌвВгаЖрИіЗЂЩфЭЗЖдгІ1 ИіНгЪеЭЗЁЃЕЋЮвУЧдкЪЕМЪгІгУжаЗЂЯжЃЌШчЙћеЯАЮяЕФУцКмДѓ(ШчЧНБк)ЃЌГЌЩљВЈДЋИаЦїПЩвдгУРДзМШЗВтОрЃЌЕЋШєНЋЦфгІгУдкаЁГЕЗРзВЯЕЭГжаЃЌгЩгкеЯАЮяГЪжљзДЃЌЖјГЌЩљВЈЗЂЩфЭЗгавЛЖЈЕФЩЂЩфНЧ(зѓгв)ЃЌвђДЫМДЪЙеЯАЮяВЛдкаЁГЕе§ЧАЗНЃЌГЌЩљВЈШдФмМьВтЕНаБЧАЗНЛиВЈЃЌетОЭИјжЧФмПижЦГЕСОааНјДјРДРЇФбКЭЮѓЕМЃЌЮЊСЫНтОіетвЛЮЪЬтЃЌЮвУЧЬсГіСЫвЛжжЪЙгУЫЋНгЪеЭЗЕФЗНАИЃЌВЂДгЪЕгУНЧЖШИјГіСЫвЛЬзОпЬхПижЦВпТдЁЃ ЁЁЁЁ2ЯЕЭГЕФНсЙЙСїГЬЩшМЦ ЁЁЁЁЮвУЧЕФећИіЯЕЭГашвЊЭъГЩВтОрЃЌВтЫйЃЌЖЈЮЛЃЌПижЦаЁГЕдЫЖЏЕШЙІФмЃЌЯЕЭГАќРЈШчЯТСљВПЗжЃК ГЌЩљВЈЗЂЩфЕчТЗЃЌ ГЌЩљВЈНгЪмЕчТЗЃЌаХКХДІРэЦїЃЌЮТЖШВтСПЃЌаЁГЕПижЦЕчТЗЕШЮхВПЗжЁЃЯЕЭГНсЙЙПђЭМШчЭМвЛЫљЪОЃК ЁЁЁЁ  ЁЁЁЁЭМ1ЃКЯЕЭГНсЙЙПђЭМ ЁЁЁЁЭЈЙ§ЕЅЦЌЛњВњЩњ40k ЕФЗНВЈЃЌОЙ§ЗХДѓКѓЧ§ЖЏГЌЩљВЈДЋИаЦїЗЂЩфЭЗЃЌДгЖјЗЂГіГЌЩљВЈЃЌгіЕНЧАЗНЮяЬхЗДЩфКѓгЩНгЪеЖЫВЖзНЃЌОЙ§ЖдСНИіНгЪеЭЗВЖзНЪБМфЕФМЦЫувдМАМгШыЮТЖШВЙГЅЃЌХаЖЯзюжеЧАЗНаЁГЕЕФЗНЯђгыОрРыЃЌдйЭЈЙ§гыЧАДЮЪ§ОнВюЗжМЦЫуГіЦфЯрЖдЧАГЕЕФЫйЖШЃЌзюКѓЭЈЙ§ЫйЖШЁЂОрРывдМАЮЛжУШ§ИіЪ§ОнНјаажЧФмПижЦЃЌПижЦаЁГЕзЊЭфЛђМѕЫйТ§ааЕШЁЃ ЁЁЁЁОпЬхЕФгВМўзщГЩЮЊЃКMCU ВЩгУAT89S52 ЕЅЦЌЛњЃЌP1.0 ПкЪфГіГЌЩљВЈЛЛФмЦїЫљашЕФ40K ЗНВЈаХКХЃЌОЙ§ЗДЯрЦї7404 КѓЧ§ЖЏДЋИаЦїЃЌЮЊСЫФмЪЙГЌЩљВЈЗЂЩфЕУИќдЖЃЌЮвУЧВЂНгСЫШ§ИіЗЂЩфЭЗЃЌРћгУЭтжаЖЯ0 ПкМрВтГЌЩљВЈНгЪеЕчТЗЪфГіЕФЗЕЛиаХКХЃЌЛиВЈМьВтВЩгУКьЭтМьВтМЏГЩаОЦЌCX20106ЃЌЯдЪОЕчТЗВЩгУМђЕЅЕФ4 ЮЛЙВбєLEDЪ§ТыЙмЃЌЖЯТыгУ74LS244ЃЌЮЛТыгУ8550 Ч§ЖЏЁЃВтЮТВПЗжЪЙгУ18B20 ВтГіЕБЧАЕФЛЗОГЮТЖШгУвдХаЖЯГіГЌЩљВЈДЋВЅЕФЫйЖШЁЃ ЁЁЁЁ3 MCU ЫуЗЈПижЦ ЁЁЁЁ3.1 ОрРыМЦЫугыЗНЮЛХаЖЯ ЁЁЁЁЕЅЦЌЛњПЩвдМЦЫуГіЗЂЩфгыНгЪеЕНГЌЩљВЈжЎМфЕФЪБМфЃЌИљОнВтЮТЯЕЭГЕФЪЕМЪВтЮТЃЌ ВщевГідкИУЖдгІЮТЖШЯТЕФЩљЫйЃЌМЦЫуГіЗДЩфЮяОрРыСННгЪеЖЫЕФОрРыЁЃ РэТлЩЯгЩвдЩЯСНИіЪ§ОнЩЯОЭПЩвджБНгЪ§бЇЭЦЕМГіИУЮяЬхЕФПеМфЮЛжУ(ШчЭМ2 КЭЙЋЪНвЛЁЂЖўЫљЪО)ЁЃ ЁЁЁЁ  ЁЁЁЁ  ЁЁЁЁЭМ2 ГЌЩљВЈДЋИаЦїПеМфЗНЮЛ ЁЁЁЁЦфжаd ЮЊR1 гыR2 ЕФОрРыЃЌz1ЁЂz2 ЗжБ№ЮЊЮяЬхЕНИїИіНгЪеЖЫЕФОрРы ЃЌШчЙћжБНгетбљМЦЫуОЭЛсЙ§гкИДдгЃЌЦеЭЈЕЅЦЌЛњДІРэЕФЛАКФЪБНЯЖрЃЌ гкЪЧЮвУЧЬсГіСЫвЛжжЛљгкМЦЫуЖўепОрРыВюРДДѓжТХаЖЯЮяЬхЮЛжУЕФЗНЗЈЁЃвЛАуРДНВаЁГЕжЛЙиаФдкГЕЧАЗНЕФЮяЬхЃЌЮвУЧЩшЖЈвЛИіОрРыВЮЪ§lДњБэЧАЗНеЯАЮягыаЁГЕЕФЫЎЦНОрРыЃЌдйЩшЖЈвЛИіОрРыВЮЪ§hЃЌДњБэЧАЗНеЯАЮягыаЁГЕЕФДЙжБОрРыЁЃЮвУЧПЩвдгЩЯТУцЕФЙиЯЕЭЦЕМГіhЃЌ lЃЌ dгыz2-z1ЕФЙиЯЕ(ЙЋЪН3---ЙЋЪН6)ЁЃ ЁЁЁЁ  ЁЁЁЁНЋЙЋЪН6ЯыМѕЕФСНЯюзіГ§ЗЈВЛФбЗЂЯжЕквЛЯюЪМжеДѓгкЕкЖўЯюЃЌЫљвдz2-z1ЪЧЙигкlЕФдіКЏЪ§ЃЌ ЭЌЪБЫцзХhЕФМѕаЁЃЌz2-z1ЭЌбљЛсБфДѓЃЌвВОЭЪЧЫЕЕБеЯАЮяЬхППНќаЁГЕЪБЃЌШчЙћЦфЦЋРыСЫаЁГЕЕФжааФ(МДВЛЛсзВЕН)гавЛИіУїЯдЕФЬиеїЮЊЦфz2-z1ЕФжЕЛсБШНЯДѓЃЌЮвУЧПЩвдШЁd=5cm h=30cmЃЌ ШУlдк[10cmЃЌ30cm]МфБфЛЏЃЌзіГіЕФЧњЯпШчЭМ3ЫљЪОЃЌИїИіЮяРэСПЕФМИКЮЙиЯЕМћЭМ4 ЁЃ ЁЁЁЁ 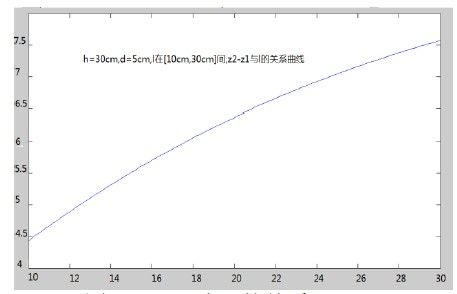 ЁЁЁЁЭМ3 z2-z1гыlЕФЙиЯЕ ЁЁЁЁ 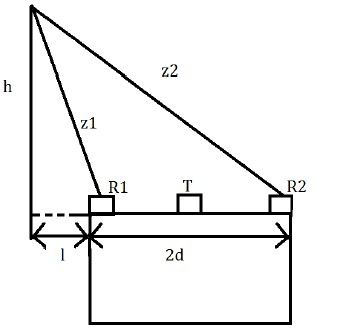 ЁЁЁЁЭМ4 ИїИіЮяРэСПЕФМИКЮЙиЯЕ ЁЁЁЁВЛФбЗЂЯжЃЌЕБlОрРыдк[10cmЃЌ30cm](h 4cm.ОнДЫЮвУЧЩшЖЈСЫвЛИіуажЕ4cmЃЌЕБМьВтЕНВюжЕДѓгк4cmЃЌВЛашвЊзіШЮКЮЩВГЕПижЦЃЌжБНгжБааЭЈЙ§ЃЌЭЈЙ§етбљМђЕЅЕФМЦЫуХаЖЯЃЌЮвУЧПЩвдгааЇБмУтгЩгкЦЋРыаЁГЕжааФЕФеЯАЮяППаЁГЕЙ§НќдьГЩЕФz1ЃЌz2ЕФжЕЙ§аЁЃЌДгЖјв§РДПЩФмЕФЩВГЕЮѓХаЁЃдкзіетИіЯюФПЪБЃЌЮвУЧВЩгУЕФГЕФЃЬхЛ§ВЛДѓЃЌвђДЫЩшМЦЕФуажЕЕШВЛЪЧКмДѓЃЌШєгІгУЕНЪЕМЪГЕФЃжаЪБПЩИљОнЧщПіИФБфуажЕЕФДѓаЁЁЃ ЁЁЁЁ3.2ЫйЖШЕФМЦЫу ЁЁЁЁЫйЖШЮвУЧВЩШЁМђЕЅЕФНќЫЦЦНОљНјааЙРЫуЃЌЮвУЧПЩвдМЦЫуГіЯЕЭГВтОрЕиМфИєдМЮЊ120msЃЌЭЈЙ§НЋЕБЧАЕФВтОрНсЙћгыЩЯДЮВтОрНсЙћзіВюБШНЯЃЌИљОнЙЋЪН7ПЩвдЙРЫуГіЕБЧАЫйЖШЕФНќЫЦжЕЃК ЁЁЁЁ  ЁЁЁЁ3.3ЯЕЭГСїГЬ(МћЭМ5) ЁЃ ЁЁЁЁ 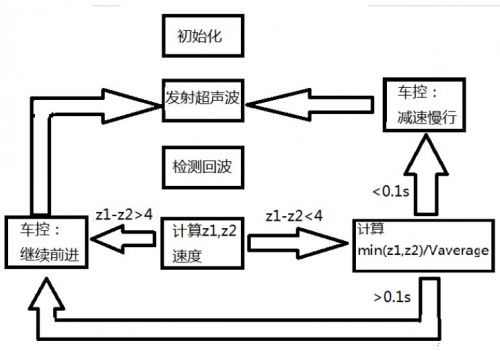 ЁЁЁЁЭМ5ЯЕЭГСїГЬ ЁЁЁЁ4ВПЗжВтЪдНсЙћ ЁЁЁЁБэ1ЪЧЮвУЧЖдВтОрЕчТЗЕЅЖРЕФВтЪдНсЙћЃК(ЕЅЮЛcm) ЁЃ ЁЁЁЁ 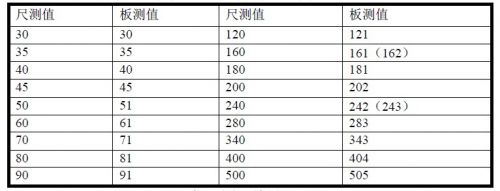 ЁЁЁЁБэ1 ВтОрНсЙћ ЁЁЁЁДгДЫБэжаПЩвдПДГіЮвУЧЕФВтОрЕчТЗЪЧКмОЋШЗЕФЁЃ ЁЁЁЁЭМ6ЪЧЮвУЧЖдЫЋНгЪеЭЗЗНАИЕФВтЪдНсЙћЃК ЁЁЁЁ  ЁЁЁЁЭМ6 ЫЋНгЪеЭЗЗНАИВтЪдНсЙћ ЁЁЁЁетСљЗљЭМжаЃЌЩЯШ§ЗљОљЮЊгУгвНгЪеЭЗНгЪеаХКХЪБМфМЦЫуГіЕФОрРыЃЌЖјЯТШ§ЗљОљЮЊгУзѓНгЪеЭЗНгЪмаХКХЪБМфМЦЫуГіЕФОрРыЃЌДгжаврПЩПДГіЕБеЯАЮяЦЋРыжааФЪБЃЌзѓгвНгЪеЭЗВтГіЕФОрРыУїЯдВЛЭЌЃЌгЩДЫПЩгУРДЖЈЮЛЁЃ ЁЁЁЁзюКѓЕБЮвУЧЭъГЩећИіаЁГЕЯЕЭГЕФЕїЪдКѓЃЌгУЫќВтЪдЗЂЯжЮоТлЪЧдЫЖЏЕФЛЙЪЧОВжЙЕФеЯАЮяЃЌдкаЁГЕЧАЗНЕФШЮКЮЮЛжУЃЌаЁГЕЖМПЩе§ШЗХаКѓзіГіЧАНјЛђЭЃжЙЕФЖЏзїЁЃ ЁЁЁЁ5 НсТл ЁЁЁЁзлЩЯЫљЪіЃЌБОЯЕЭГЬсГіРДвЛжжЛљгкЫЋГЌЩљВЈНгЪеЭЗЃЌ3ЗЂЩфЭЗЕФГЕдиздЖЏВтЫйВтОрПижЦЯЕЭГЃЌПЩвдгааЇЕФЦ№ЕНЖдПЊГЕЫОЛњБЃЛЄдЄХаЬсабЕШзїгУЃЌЕБЫОЛњПЊГЕгіЕННєМБЪТЙЪВЩШЁСЫДэЮѓЕФПижЦДыЪЉЪБЃЌИУЯЕЭГЛЙПЩвдЧПааОРе§ЃЌЛђНјааБЈОЏЬсабЫОЛњМьВщЁЃгЩгкИУЯЕЭГМђЕЅЃЌОМУЪЪгУЃЌЙЄзїЮШЖЈЃЌОпгаЗЧГЃДѓЕФЪаГЁЧАОА . |
ЭјгбЦРТл