
ЖрЙІФмжЧФмЪвФкЖЈЮЛЕМКНвЧЩшМЦАИР§
ЗЂВМЪБМфЃК2015-10-29 11:17
ЗЂВМепЃКdesignapp
|
ЁЁЁЁвЛЁЂЯюФПИХЪі ЁЁЁЁ1.1 ЯюФПеЊвЊ ЁЁЁЁФПЧАЃЌдквЛаЉДѓаЭЩЬГЁЛђЛсГЁжаЃЌНіДцдкЪвФкГЁЫљЕФЦНУцЭМЃЌЕЋЖдгкДѓВПЗжШЫРДЫЕЃЌвЊдкЖЬЪБМфФкЭЈЙ§ЦНУцЭМевЕНвЛЬѕЗНБуПьНнЕФТЗОЖЕНДяФПЕФЕиВЛЪЧвЛМўКмЧсЫЩЕФЪТЧщЁЃБОЗНАИЛљгквтЗЈАыЕМЬхЙЋЫОЬсЙЉЕФiNEMOЦНЬЈЃЌЩшМЦСЫвЛПюИќШЫадЛЏЕФЁЂИќЗНБуПьНнЕФЁЂгІгУгкДѓаЭЪвФкГЁЫљЕФЖрЙІФмЕМКНвЧЁЃИУЕМКНвЧжївЊгаЖЈЮЛЁЂаЃзМЁЂЕМКНЕШЙІФмЃЌжївЊЪЕЯжЪЧЭЈЙ§STEVAL-MK1062V2ЪЕбщАхЩЯЕФШ§жсЭгТнвЧВтСПНЧЫйЖШРДШЗЖЈЗНЯђЃЌЭЈЙ§ЕиДХФЃПщЕФЯпадМгЫйЖШДЋИаЦїРДШЗЖЈЮЛвЦЃЌЭЈЙ§ЮТЖШДЋИаЦївдМАЦјбЙДЋИаЦїРДЖСШЁЪ§ОнЃЌЭЈЙ§Wi-FiДЋЪфЪ§ОнЃЌзюжеЭЈЙ§AndroidжЧФмЪжЛњНјааМЦЫуЃЌВЂАбНсЙћЯдЪОГіРДЁЃЯрНЯгкЦНУцЭМЃЌБОЕМКНвЧПЩвдЪЙгУЛЇЕУЕНИќИіадЛЏЁЂИќЗНБуМђНрЕФПЩПчТЅВуЕФЖЈЮЛЕМКНЗўЮёЁЃ ЁЁЁЁ1.2 ЯюФПБГОА/бЁЬтЖЏЛњ ЁЁЁЁФПЧАЃЌдНРДдНЖрЕФДѓаЭЩЬГЁЛђЛсГЁаТНЈЦ№РДЃЌетЦфжаСеРХТњФПЕФЗўЪЮЦЗХЦЁЂВЭвћЁЂЕчЭцГЧЁЂЕчгАЕШЕШЙКЮягщРжГЁЫљЃЌЬиЖЈГЁКЯЕФгХЛнЛюЖЏЁЁетаЉЖМЮовЛВЛЮќв§зХЙЫПЭЃЌетвВЕМжТЩЬГЁжавЛаЉдНРДдНГЃМћЕФЮЪЬтЃК ЁЁЁЁШчКЮдкШЫЩНШЫКЃжаевЕНвЛЬѕЗНБуПьНнЕФЭООЖЕНДяФПЕФЕиЖјЮоашЭЈЙ§ЦНУцЭМ? ЁЁЁЁШчКЮдкВЛЭЌТЅВуМфЪЕЯжзюЖЬЪБМфКЭзюЖЬТЗОЖ? ЁЁЁЁШєКЭЭЌАщзпЪЇШчКЮдкзюЖЬЪБМфФкЭЈЙ§зюЗНБуЭООЖевЕНЖдЗН? ЁЁЁЁдкЗЂЩњНєМБЧщПіЯТЃЌШчКЮзюПьзюгааЇЕФЬгРыЯжГЁ? ЁЁЁЁЮовЩЃЌдкетРраЭГЁЫљжаЃЌШчКЮПьЫйЕФЖЈЮЛЕМКНЖдгкЙЫПЭРДЫЕЪЧИіЪЎЗжживЊЕФЮЪЬтЁЃзнЪЙгаЦНУцЭМЕФДцдкЃЌШдШЛашвЊЭЈЙ§вЛЯЕСаЕФЗжЮіВХПЩЕУГіНсТлЁЃШєЛЙПМТЧЕНПчТЅВуЮЪЬтЃЌЛЙашПМТЧПчТЅВуЗНЪНЫљгУЕФЪБМфвдМАЫйЖШЁЃгЩДЫЮвУЧЯЃЭћПЩвдгаИіИќМгЁАжЧФмЁБЕФЕМКНЙЄОпРДжИв§ЮвУЧИќПьИќЗНБуЕФЕНДяФПЕФЕиЁЃБОЕМКНвЧЮЊЙЫПЭЯдЪОИќОЋШЗЕФЗНЯђЁЂОрРыЃЌЬсЙЉзюгХЭООЖЃЌДгЖјМѕЩйЙЫПЭдкЖЈЮЛЕМКНЩЯЫљЛЈЕФЪБМфЁЃ ЁЁЁЁдкМЦЫужеЖЫКЭЯдЪОФЃПщЕФбЁдёЩЯЃЌЮвУЧПМТЧЪЙгУжЧФмЪжЛњзїЮЊБОДЮЯюФПЕФжеЖЫЃЌВЂбЁШЁОпгаandroidПЊЗЂЦНЬЈЕФжЧФмЪжЛњЁЃжЧФмЪжЛњОпгаБуаЏЁЂдЫЫуЫйЖШПьЁЂЭтЙлбЄРіЁЂПЊЗЂЗНБуЁЂЪЙгУШЫШКЖрЕШЬиЕуЃЌБугкДЋИаЦїЪ§ОнЕФДІРэЃЌвдМАШэМўЕФЭЦЙуЁЃВЂЧв2011ФъГѕЪ§ОнЯдЪОЃЌНіе§ЪНЩЯЪаСНФъЕФВйзїЯЕЭГAndroidвбОГЌдНГЦАдЪЎФъЕФШћАрЯЕЭГЃЌЪЙжЎдООгШЋЧђзюЪмЛЖгЕФжЧФмЪжЛњЦНЬЈЁЃ ЁЁЁЁAndroidЕФгХЪЦгавдЯТМИЕуЃК ЁЁЁЁПЊЗХадЃКПЊЗЂЕФЦНЬЈдЪаэШЮКЮвЦЖЏжеЖЫГЇЩЬМгШыЕНAndroidСЊУЫжаРДЁЃЯджјЕФПЊЗХадПЩвдЪЙЦфгЕгаИќЖрЕФПЊЗЂепЃЌгаРћгкЛ§РлШЫЦјЁЃ ЁЁЁЁеѕЭбЪјИПЃКгУЛЇПЩвдИќМгЗНБуЕиСЌНгЭјТчЃЌдЫгЊЩЬЕФжЦдММѕЩйЁЃ ЁЁЁЁЗсИЛЕФгВМўЃКгЩгкAndroidЕФПЊЗХадЃЌжкЖрЕФГЇЩЬЛсЭЦГіЧЇЦцАйЙжЃЌЙІФмЬиЩЋИїОпЕФЖржжВњЦЗЁЃЙІФмЩЯЕФВювьКЭЬиЩЋЃЌШДВЛЛсгАЯьЕНЪ§ОнЭЌВНЁЂЩѕжСШэМўЕФМцШнЁЃ ЁЁЁЁПЊЗЂЩЬЃКAndroidЦНЬЈЬсЙЉИјЕкШ§ЗНПЊЗЂЩЬвЛИіЪЎЗжПэЗКЁЂздгЩЕФЛЗОГЁЃвђДЫВЛЛсЪмЕНИїжжЬѕЬѕПђПђЕФзшФгЁЃ ЁЁЁЁGoogleгІгУЃКAndroidЦНЬЈЪжЛњНЋЮоЗьНсКЯгХауЕФGoogleЗўЮёЁЃ ЁЁЁЁзлКЯвдЩЯПМТЧвђЫиЃЌЮвУЧОіЖЈдкandroidЦНЬЈЩЯНјааЪ§ОнЕФДІРэгыаЇЙћЯдЪОЁЃгыДЫЭЌЪБЃЌЮвУЧЯЃЭћФмЭиеЙВПЗжЙІФмШчгявєЪЖБ№ЃЌвєЦЕЬсЪОЕШЕШРрЫЦгкЁАЕМУЄШЎЁБЕФЙІФмЁЃ ЁЁЁЁЖўЁЂашЧѓЗжЮі ЁЁЁЁ2.1 ЙІФмвЊЧѓ ЁЁЁЁ1. ЪЕЪБВЩМЏЕБЧАЕФЛЗОГаХЯЂЃЌвдТњзуЪЙгУепЖдгкСЫНтЕБЧАЛЗОГЕФашЧѓЁЃ ЁЁЁЁ2. ЪЕЪБВЩМЏЪЙгУепЕФЫйЖШаХЯЂЃЌгУгкЖдЪЙгУепЮЛжУзДЬЌЕФИќаТЁЃ ЁЁЁЁ3. ФмЙЛНјааЕиЭМЕФДцДЂКЭИќаТЃЌВЂИљОнЪЙгУепЕФЮЛжУКЭФПЕФЕиЕФаХЯЂЃЌЖдЪЙгУепЕФааНјЗНЯђНјаав§ЕМЁЃ ЁЁЁЁ4. ЪЕЯжЪЕбщАхКЭAndroidжЧФмЪжЛњЖЫЕуЖдЕуWi-FiЭЈаХЃЌШЗБЃВЩМЏаХЯЂФмМАЪБзМШЗДЋЪфЕНЪжЛњЖЫЁЃ ЁЁЁЁ5. СМКУЕФЯдЪОФЃПщЃЌПЩвдШУИїжжаХЯЂгаЬѕВЛЮЩЕФдкAndroidЦНЬЈЯдЪОЁЃ ЁЁЁЁ6. аЃе§ЙІФмЃЌНјааЛљзМЮЛжУЪЖБ№вдЬсИпЖЈЮЛОЋЖШЁЃ ЁЁЁЁ2.2 адФмБъзМ ЁЁЁЁ1. ЖдгкЛЗОГЮТЖШЕФМьВтЮѓВюВЛГЌЙ§0.5ЁуЁЃ ЁЁЁЁ2. ВтСПЫйЖШОЋШЗЃЌзюКѓЖдЪЙгУепЮЛжУЕФЪЖБ№дкОрРыаЃе§Еу200mВЛГЌЙ§10mЁЃ ЁЁЁЁ3. ЕМКНЪБЖдгкЕРТЗКЭааЪЛЗНЯђЕФЪЖБ№зМШЗгааЇЁЃ ЁЁЁЁ4. ЖдТЅЬнКЭЕчЬнНјааЕМКНЪБЖдгкЕРТЗКЭааЪЛЗНЯђЕФЪЖБ№зМШЗгааЇЁЃЪЖБ№ЁЃ ЁЁЁЁ5. ЕМКНЪБФмЙЛЪЖБ№ТЅФкЕФИДдгЛЗОГЃЌЖдДцдкВЛЭЌЕРТЗЪБФмЙЛНјаажЧФмбЁТЗЁЃ ЁЁЁЁ6. ЪжЛњЖЫЪЕЪБЮЛжУЯдЪОЮоУїЯдбгГйЁЃ ЁЁЁЁШ§ЁЂЗНАИЩшМЦ ЁЁЁЁ3.1 ЯЕЭГЙІФмЪЕЯждРэ(Г§ЭМЦЌЭташгаЮФзжНщЩм) ЁЁЁЁ3.1.1ЖЈЮЛЪЕЯжЗНЗЈ: ЁЁЁЁSTEVALЪЕбщАхЬсЙЉLSM303DLH(СљжсЕиДХФЃПщ)КЭLPR430AL(СНжсКсЙіИЉбіЭгТнвЧ) LY330ALH(вЛжсЦЋКНЭгТнвЧ)ЃЌРћгУСљжсЕиДХФЃПщжаЕФШ§жсМгЫйЖШДЋИаЦїВтСПМфИєвЛЖЈЖЬЪБМфМфИєКѓЕФЯрЖдАхЦНУцЕФМгЫйЖШ  ЃЌВЂЧвРћгУ  ЃЌВЂЧвНјааРлМгЃЌПЩвдЕУЕНдкВЛЭЌЪБМфЯрЖдгкАхЦНУцЕФЫйЖШ ЃЌШЛКѓРћгУЭгТнвЧПЩвдВтСПЕФМгЫйЖШЖдвдЩЯЕФЫйЖШНјааБфЛЛЃЌДгЖјЕУЕНдкецЪЕПеМфжаЕФШ§ИіЗНЯђЕФЫйЖШЗжСП(вдЪњжБЯђЩЯЮЊzжсе§ЗНЯђЃЌxЃЌyПЩвдОпЬхЖЈвхЃЌТњзуШ§ЮЌжБНЧзјБъЯЕЙиЯЕ)ЁЃПМТЧЕННЧЖШСП  ЪЧБъСПЃЌЕЋЪЧЮоЧюаЁСП  ЪЧЪИСПЃЌФЧУДПЩвдРћгУЙЋЪН  ЕУЕНдкНЯЖЬЪБМфФкЕФзјБъЯЕбиШ§ИіЗНЯђЕФа§зЊБфЛЛ(дкЪЕМЪжаРћгУКмЖЬЕФЪБМфРДЬцДњ )  ЁЃ ЁЁЁЁзјБъЯЕзЊЛЛЙЋЪНЃК ЁЁЁЁ   ЁЁЁЁЦфжа  ЗжБ№ЪЧбиxЃЌyЃЌzШ§ИіЗНЯђдкЖЬЪБМфФкЕФзЊЙ§ЕФМаНЧЃЌВЛЖЯЕФРћгУвдЩЯзЊЛЛЙЋЪНПЩвдЕУЕНЕБЧАЪЕбщАхзјБъЯЕКЭецЪЕПеМфзјБъЯЕЕФзЊЖЏЙиЯЕЃЌРћгУ  ПЩвдФцЯђЭЦЕМГі  ЃЌ(дкецЪЕПеМфзјБъЯЕжаЕФШ§ИіЫйЖШЗжСП)ЃЌдйРћгУетШ§ИіЫйЖШЗжСППЩвдМЦЫуГіЮЛвЦЃЌДгЖјЪЕЯждкЖЈЮЛЁЃ ЁЁЁЁ3.1.2ЕМКНЪЕЯжЗНЗЈЃК ЁЁЁЁгЩгкОпЬхТЗЯпЕФМЦЫуЖММЏжадкЪжЛњжаЃЌЖјДЋИаЦїВПЗжНіИКд№аХЯЂЕФВЩМЏЃЌЖјЪжЛњЕФМЦЫуЃЌЯдЪОЙІФмЖМЪЎЗжЕФЧПЮвУЧПЩвдНЋБШНЯИДдгЕФЕиЭМКЭЫуЗЈгІгУдкЪжЛњжаЁЃ ЁЁЁЁЖјAndroidЪжЛњвЛАуЪЧДѓЦСФЛДЅУўЃЌжеЕуШЗЖЈЃЌЮЛжУаЃзМЖМКмЗНБуЃЌЕМКНЪЧашвЊгаЕуПМТЧЕФЕиЗНЁЃ ЁЁЁЁЮвУЧЕФЕиЭМдкЪжЛњЕФДцДЂжаЗжЮЊСНВуЃЌЕзВуДцДЂЕФЪЧЕиЭМЕФЭиЦЫНсЙЙЃЌПЩвдИљОнШчНёЕФЮЛжУЃЌЪЙгУзюЖЬТЗОЖЫуЗЈЕШТЗОЖЫуЗЈевЕНвЊЬсЪОЕФааНјЗНЯђЁЃЖјЖЅВуДцДЂЕФЪЧЕиЭМЕФЯдЪОТЗОЖЃЌПЩвддкЦСФЛЩЯНјааЯдЪОВЂНјаав§ЕМЁЃЖјдкааНјЙ§ГЬжавВвЊЭЈЙ§ДЋИаЦїШЗЖЈЪЙгУепЕФдЫЖЏЗНЯђКЭЮЛжУНјааЪЕЪБМЦЫуЃЌЬсЪОГізюаТЕФв§ЕМЗНЯђЁЃ ЁЁЁЁ3.1.3 RFIDаЃе§ЃК ЁЁЁЁгЩгкЯЕЭГЪЧПЊЛЗЯЕЭГЃЌЖЈЮЛЕФЗНЗЈРћгУМгЫйЖШМЦЫуЮЛвЦЃЌНЧЫйЖШШЗЖЈзЊЖЏЗНЯђЕФЗНЗЈРДзюжеЛёШЁЮЛвЦаХЯЂДгЖјЛёЕУЮЛжУаХЯЂЃЌЕЋЪЧдкЪЕМЪжаЛсГіЯжвдЯТЮЪЬтЃК1ЁЂЯпМгЫйЖШКЭНЧЫйЖШЕФЛёШЁЪЧМфИєВЩбљЛёЕУ 2ЁЂЪЕМЪЧщПіжаВЩгУЕФЪЧВюЗжЧѓКЭЖјВЛЪЧЛ§ЗжЛсв§ШыЮѓВю 3ЁЂдкЛёШЁзЊЖЏЗНЯђЕФЪБКђФЌШЯ ЕШМлЃЌЕЋдкЪЕМЪжаВЛЕШМлЃЌвђЮЊКъЙлЕФНЧЖШВЂЗЧЪИСП4ЁЂДЋИаЦїБОЩэЮѓВюЕФДцдк ЁЁЁЁПМТЧЕНЮѓВюЫцзХЪБМфКЭЮЛвЦЕФЛ§РлЛсДѓЕНгаУїЯдгАЯьЃЌЫљвдашвЊНјаааЃе§ЃК1)ЩфЦЕБъЧЉРДНјаааЃе§ЃКдкЪвФкЕФЙЬЖЈЕиЕуЗХШыЩфЦЕБъЧЉЃЌЪЕбщАхЩЯМгШыRFID readerФЃПщЃЌЕБЕНДяжИЖЈЕиЕуЪЧЃЌгУЛЇПЩЭЈЙ§ЫЂПЈаЮЪННјаааЃе§ЁЃдкНјвЛВНЩшМЦжаПЩвдПМТЧЪЙгУдкЙЬЖЈЕиЕуЗХШыДѓЙІТЪаХКХЗЂЩфЦїЃЌдкгУЛЇТЗЙ§ЪБздЖЏНгЪеаХКХНјаааЃе§ЁЃ ЁЁЁЁ2)ШЫЙЄаЃе§ЃКгУЛЇПЩвдЭЈЙ§ЪжЛњдкЙлВьЕНЬиЖЈЮЛжУКѓПЩвдздаааЃе§ЃЌдкБШНЯШнвзЪЖБ№ЕФЬиЪтЮЛжУЃЌгУЛЇПЩвдЭЈЙ§ДЅЦСНјаааЃе§ЃЌДгЖјИЈжњЩфЦЕаЃе§ЃЌЪЕЯжИќКУЕФаЃе§аЇЙћ ЁЁЁЁ 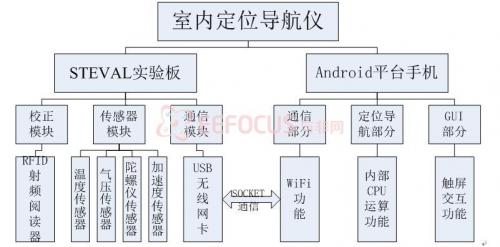 ЁЁЁЁЭМ3.1.1 гВМўМмЙЙЭМ ЁЁЁЁ 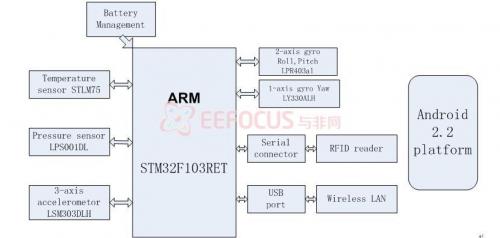 ЁЁЁЁЭМ3.1.2 ЯЕЭГгВМўНсЙЙПђЭМ ЁЁЁЁ3.2 гВМўзЪдДХфжУ ЁЁЁЁ(1)RFIDЖСаДЦїПЊЗЂАх ЁЁЁЁ(2)STEVAL-MK1062V2ЪЕбщАх ЁЁЁЁ(3)Android 2.2ЯЕЭГИпадФмжЧФмЪжЛњ ЁЁЁЁ(4)USBЮоЯпЭјПЈ ЁЁЁЁ   ЁЁЁЁ3.3ЯЕЭГШэМўМмЙЙ(Г§ЭМЦЌЭташгаЮФзжНщЩм) ЁЁЁЁ 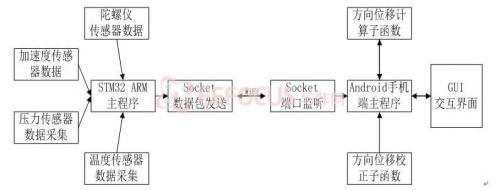 ЁЁЁЁЭМ3.3.1 ШэМўМмЙЙЭМ ЁЁЁЁШэМўМмЙЙШчЭМ3.3.1ЫљЪОЃЌШэМўЯЕЭГжївЊАќРЈЃКЭгТнвЧЁЂЯпМгЫйЖШМЦЕШдЫЖЏДЋИаЦїаХЯЂЕФЛёШЁЃЌЦјбЙЮТЖШЕШЛЗОГСПДЋИаЦїаХЯЂЕФЛёШЁЃЌRFIDЖСШЁБъЧЉВњЩњжаЖЯЖдЮЛжУЗНЯђаХЯЂЕФаЃе§ЃЌЮоЯпЭјПЈЧ§ЖЏЕивЦжВЃЌsocketЬзНгзжЮоЯпЭјТчЭЈаХЃЌЛљгкЭгТнвЧНЧЫйЖШСПЖдЕБЧАЪЕбщАхЗНЯђЕФМЦЫуЃЌЛљгкЪЕбщАхЗНЯђКЭЯпМгЫйЖШСПЖдНЯаЁЪБМфЖЮФкЪЕбщАхЮЛвЦЕФМЦЫуЃЌAndroidЪжЛњЖдЮЛжУЁЂЗНЯђЁЂЕМКНЁЂЮТЖШаХЯЂЕФЯдЪОЁЃ ЁЁЁЁ3.4 ЯЕЭГШэМўСїГЬ(Г§ЭМЦЌЭташгаЮФзжНщЩм) ЁЁЁЁ 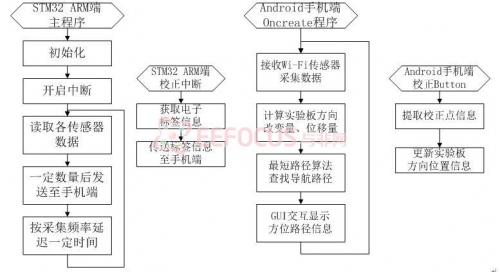 ЁЁЁЁЭМ3.4.1 ГЬађдЫааСїГЬЭМ ЁЁЁЁ1.ARMЖЫжїГЬађЃКГѕЪМЛЏЪЕбщАхИїДЋИаЦїПижЦзж;ЩшжУжаЖЯЯђСПЃЌПЊЦєжаЖЯ;НЈСЂsocketЬзНгзж;вЛЖЈЦЕТЪЖСШЁМгЫйЖШЁЂНЧЫйЖШЁЂЮТЖШЁЂЦјбЙЕШДЋИаЦїВтСПЫљЕУЪ§ОнЃЌ10ДЮВтСПжЕЮЊвЛзщДђАќWi-FiЗЂЫЭжСAndroidЪжЛњЖЫШэМўЁЃ ЁЁЁЁ2.ARMЖЫаЃе§жаЖЯЃКRFIDдФЖСЦїМьВтЕНЕчзгБъЧЉДЅЗЂжаЖЯЃЌЛёШЁБъЧЉБрКХЃЌНЈСЂаХЯЂжЁЗЂЫЭжСЪжЛњЖЫШэМўЁЃ ЁЁЁЁ3.ЪжЛњЖЫжїГЬађЃКГѕЪМЛЏГЬађЃЌМрЬ§SocketЖЫПк;НгЪеARMЗЂЫЭЕФДЋИаЦїВтСПжЕЪ§ОнАќ;ЖдЪ§ОнНјааТЫВЈДІРэЃЌРлМгМЦЫуЪЕбщАхЗНЯђИФБфСПЃЌИљОнЪЕбщАхЕБЧАЗНЯђМАИїЗНЯђЩЯЕФМгЫйЖШСПМЦЫуЪЕбщАхОјЖджБНЧзјБъЯЕЯТЕФЮЛвЦСП;ИљОнЕиЭМЭиЦЫаХЯЂзюЖЬТЗОЖЫуЗЈЫбЫїГіЕМКНЯпТЗ;GUIШЫЛњНЛЛЅНчУцЯдЪОЕиЭМТЗЯпЁЂЗНЮЛаХЯЂЁЃ ЁЁЁЁ4.ЪжЛњЖЫаЃе§АДМќЃКгУЛЇзпЕНУїЯдБъжОЮяДІЃЌДЅУўАДМќЃЌНЛЛЅЬсЪОгУЛЇШЗШЯЕБЧАЮЛжУЃЌИќаТГЬађФкМЦЫуЕУЕНЕФЗНЯђЮЛжУаХЯЂвдЯћГ§ЪБМфЛ§РлЮѓВюЁЃ |
ЭјгбЦРТл