
如何设计LED标牌和LED矩阵显示屏(第1部分)
发布时间:2014-12-16 10:17
发布者:designapp
|
引言 基于 LED 的标牌和矩阵显示屏为不断增长的室内外应用带来了更多的功能以及绚丽夺目的视觉效果。LED 技术的最新发展使人们很难分辨出自己看到的到底是其高质量显示屏的静止画面,还是传统的打印或绘制广告牌。本教程将详细介绍 LED 显示屏系统的基本技术原理,以及使用分立 LED 灯泡阵列设计它们需要考虑的设计问题。 LED 驱动基础 首先,我们要对比不同的LED驱动电路,以确定最佳方案。 连接电压源 众所周知,LED 灯(或二极管)在具有足够正向电压 (VF) 时开始导通。导通时其正向电流通常会发光。根据这个基本知识可以得出图 1a 中的第一种选项,不过这样行不通。因为 LED 电流是其电压偏置的指数函数(公式 1),LED 灯的光强度对该电压非常敏感。大多数情况下,大电流条件通常会将原本长寿命的 LED 变成昂贵的闪光灯泡。  (公式 1) 下面是图 1a 行不通的原因所在。在公式 1 中,IS、RS 是常数,取决于 LED 产品本身,与 VT 是热电压无关。假设串联电阻 RS 是理想值零,那么仅 0.1V 的 VF 变化就会产生 47 倍的 ILED 差异。  (公式 2) 例如,20mA 的目标 LED 电流值在其偏置电流出现仅 0.1V 的差异时就会跳变至 1A。即使考虑实际 RS 值,真实 LED 器件在具有 0.1V 偏置差异时仍会出现 10 至 20 倍的差异。 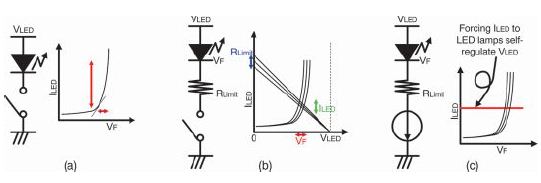 图 1.对比三种 LED 驱动电路 支持流限电阻器的电压源 现在我们来看看图 1b。添加一个限流电阻器 RLIMIT 来保护 LED 灯。由于有限流电阻器,因此该灯不会被烧坏。在视频显示器应用领域,这种方法在控制 LED 光强度方面仍然不够好。LED 曲线和 RLIMIT 产生的负载曲线可决定其 LED 电流值。如红色或蓝色标记所示,该 LED 和电阻器分别存在制造误差造成的正向电压变化及电阻变化。这些误差因素会使 LED 电流(绿)产生不可忽视的变化。 恒流源 图 1c 采用恒流电路而非电阻器。该恒流驱动器电路可直接将 LED 电流调节为目标值。无论 LED 灯在制造过程中会产生多少 VF 变化,LED 都会传导特定的电流值。LED 灯的光强度与通过 PN 结点的电荷紧密相关,因此该恒流驱动器是从 LED 灯获得统一光输出的理想方法。 此外,我们都知道集成电路 (IC) 可提供良好的匹配电路对。这也是选择恒流法的另一个优势。图 2 是 LED 驱动器的基本输出级结构。市场上很多 LED 驱动器 IC 都有参考电流设置端 IREF,该参考电流是镜像到其输出端的恒流。 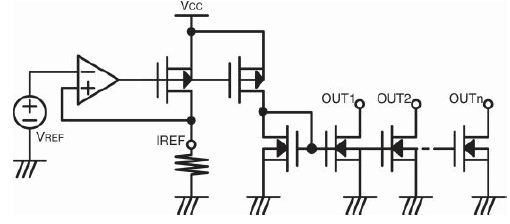 图 2. LED 驱动器 IC 的基本输出配置 图 2 是该讨论的结果,即 LED 驱动器的基本输出电路配置。 色彩驱动 到目前为止,我们已经能够确定如何驱动单个 LED 灯了。下一步是为视频显示系统实现全色彩光输出。通过组合光的不同深浅红绿蓝三原色 (RGB),任何色彩都可生成。较为熟悉的示例是采用个人计算机 (PC) 上的色彩选择工具。 数字或模拟的灰阶控制 PC 操作系统将三种色彩混合为 256 个色阶(每阶 8 个二进制位)或更多,以显示全彩色像素。对于 LED 显示系统而言,也需要采用相同概念的色阶色彩强度控制,以便在 LED 驱动器设计中实现色阶控制或灰阶控制。 首先应决定使用数字控制还是模拟控制。前面已经介绍过,经过 PN 结点的总电荷数可决定光强度,因此数字和模拟方法均可控制光强度。图 3 是数字和模拟法中的 50% 灰阶控制。在总体 256 个色阶的示例中,该 50% 表明了一个有 128 个灰阶的目标。 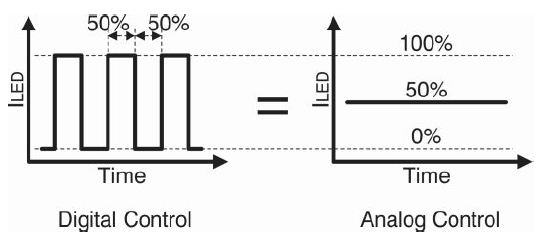 图 3.数字和模拟的 50% 强度控制 LED 电流与色彩变化 这时候,需要考虑电流变化对 LED 光输出波长值的影响。改变波长就意味着改变人眼看到的色彩。图 4 是绿色 LED 灯的实例。通常在业界,510nm 广泛代表绿色。因此,大部分 LED 灯制造商所设计的 LED 灯产品在最大额定电流下都具备 510nm 的波长。在图 4 中,随着 LED 电流的升高,波长可达到 510nm。获得绿色的最佳方法是尽量使灯的驱动电流接近最大额定值。这也就说明了为什么使用数字控制比使用模拟控制好。 选择数字控制的另一个优势是便于以数字电路模块的形式对 LED 驱动器 IC 实施控制。对于 256 阶的灰阶控制而言,数字控制的成本比模拟控制低。  图 4.绿色 LED 电流与波长实例 这种 ON/OFF 数字控制称之为脉宽调制 (PWM) 控制,或者 PWM 调光。现将 PWM 控制开关添加至图 2。 如何构成矩阵或 2D 图像 RGB LED 灯可平铺构成 2 维 (2D) 影像。 显示系统结构 RGB LED 灯可用于构成正方形的基础结构或模块。它通常包含一块 PCB 以及一个 16 × 16 至 64 × 64 的像素阵列,不同的应用有所不同。可将多个模块组合在一起,构成机械系统结构或面板。LED 显示系统厂商通常提供各种面板。每个面板都有机械框架,可放置多个模块。它包含一个或多个控制单元,用以提供电源分配、数据接口和处理器。在构建体育场大屏幕或路边广告牌等显示系统的现场,可安装多块面板构成最终显示屏。在施工现场,每块面板的所有数据线和电源线都会集中在中央控制单元。 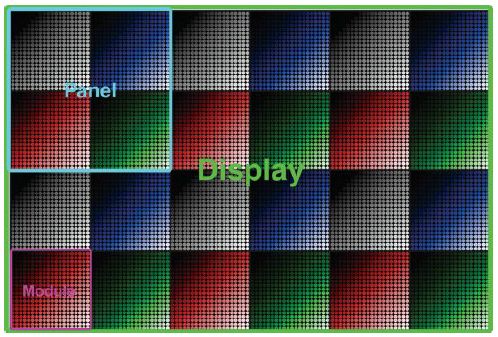 图 5.LED 显示系统由模块/面板/显示屏组成 像素间距 一套 LED 显示系统包含大量的 LED 灯和一个大电源。设计系统时需要重点考虑 LED 灯的密度优化问题。LED 灯的该密度称为每个像素的距离或像素间距。如果像素间距太密,一旦超出了人眼能识别的精度,它就不会改善影像输出质量,而且会增加成本。人眼可识别的两个单光源是在这两点形成 1 个弧度的 1/60(=1 弧分)时。 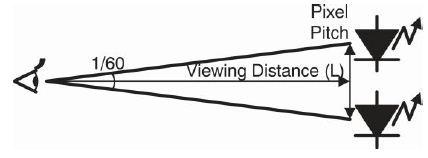 图 6.人眼可识别的分辨率 图 6 是如何计算人眼可分辨像素间距 Dpp1。如公式 3 所示,其中 L 为视距。  (公式 3) 在最佳实践中,DPP1 可视为过大,对于高质量视频系统而言三倍 Dpp1 就够好了。在公式 4 中,DPP 是指导标准。  (公式 4) 公式 4 的简单记忆方法是: 所需的像素间距(毫米:mm)=“视距”(米:m) 例如,5m 视距的系统需要 5mm 像素间距来实现良好分辨率。另一个视觉实例如图 7 所示,图中展示了过低像素间距如何降低输出影像质量。像素间距为 12.5mm 的影像(上)看起来很粗糙,无法近距离辨识。但保持一定的距离观看时影像开始变得清晰,与观看像素间距为 5mm 的影像(下)类似。这个实例清楚地说明了视距与像素间距的关系。 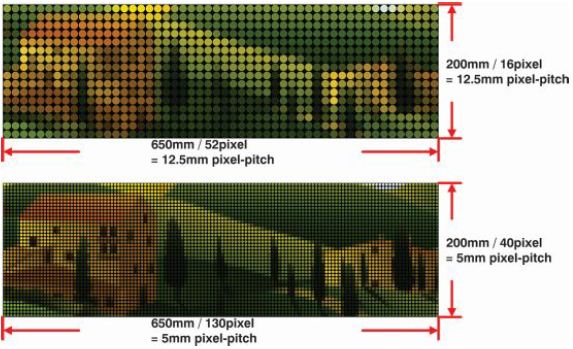 图 7.不同像素间距与视距的对比 静态驱动器与时分复用驱动器 从图 2 可以看出,LED 灯的阴极采用当前市场常见的 LED 驱动器 IC 驱动。这里要讨论 LED 灯的阳极驱动器电路。阴极采用恒流驱动器有优势,阳极希望也只提供足够的电压。但仍需做出如何驱动阳极的重要决定! 图 8 对比了静态阳极驱动器系统与时分复用阳极驱动器系统。静态阳极驱动器配置十分明确:一个 LED 驱动器 IC 驱动一个 LED。在设计具有大量像素点的系统时,静态阳极驱动器需要大量 LED 驱动器 IC。相反,时分复用阳极驱动器系统让多个 LED 灯共享一个 IC,因而使用的 LED 驱动器 IC 数量较少。时分复用驱动器的权衡在于输出 LED 光强度会因分时而降低。 在户外显示系统中,需要极强的 LED 输出来克服太阳光亮度,以便人眼能看清楚影像。在这种户外系统中,更适合选用静态阳极驱动器。另一方面,在室内系统中,时分复用阳极驱动器则是降低系统构建成本的好方法。 时分复用已经成了当前应用最常用的技术,因此我们将将其用于本文剩余部分讨论的应用中。 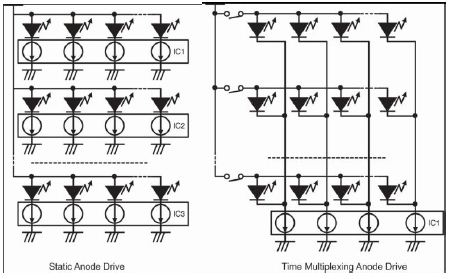 图 8.静态阳极驱动器与时分复用阳极驱动器 如何创建电影/视频影像 之前我们探讨了如何显示静态影像。如果我们不断变化静态影像,就可将其变为电影或视频。 帧速率/帧刷新率 老式模拟电视通常在一秒钟内显示 24 张不同的静态影像,帧速率为 24。 当模拟电视摄像机拍摄另一个模拟电视屏幕时,可产生由视频影像与黑色条带构成的斑马纹混合画面(图 9)。这种现象由同步电视摄像机和电视屏幕扫描率引起。在拍摄 LED 屏幕的摄像机采用时分复用阳极驱动器时,也会出现相同的问题。应用实例包括使用电视摄像机拍摄背景墙壁上由 LED 显示器放大演员的舞台影像或者用电视摄像机拍摄体育场中体育赛事比分牌或标牌等。要避免这个问题,LED 显示器现在需要比摄像机系统运行得更快,特别是在专用 LED 显示器市场。 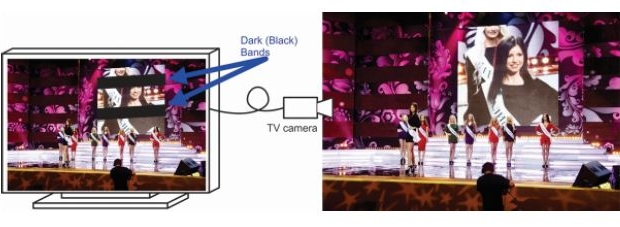 图 9. 电视摄像机拍摄另一个电视屏幕引起的黑色条带 为满足更快运行这一要求,很多 LED 显示系统都在一个帧周期内反复显示相同的影像,称为帧刷新率。图 10 是帧速率与刷新率的关系。只有两张帧影像:A 和 B。每个帧重复“影像 x”两次。因而本实例“帧刷新率”= 2 ד帧速率”。 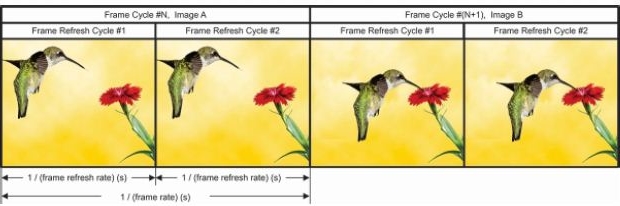 图 10.帧速率与帧刷新率 在普通 LED 显示系统中,帧速率在 50Hz 至 120Hz 的范围内,而帧刷新率则介于 50Hz 至 2kHz 之间。 ON/OFF 控制驱动器或 PWM 控制驱动器 为了满足系统帧速率与刷新率的需求,需要在实施逻辑电路的两种方法中做出选择。第一种是 ON/OFF 控制驱动器,而第二种则是 PWM 控制驱动器。 图 11a 是采用 ON/OFF 控制 IC 的系统,具有每个位对应于一个输出的 ON/OFF 寄存器。寄存器位的逻辑高可打开对应的输出,而逻辑低则可将其关闭。 图 11b 是采用 PWM 控制 IC 的系统,具有一个可参考时钟计数器的灰阶参考时钟输入端。另外,该 IC 还具有一组保存灰阶逻辑代码的寄存器。PWM 比较器可通过计数器和灰阶 (GS) 寄存器比较和生成 PWM 输出模式。 对于这两种类型的驱动器 IC 而言,两种工作都是并列执行的: - 恒流驱动器模块根据当前显示周期数据的输入驱动其 LED 灯阵列; - 并将下一个显示周期的数据接收在移位寄存器中。 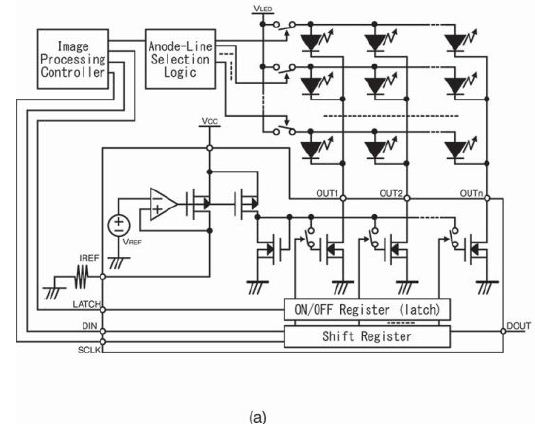 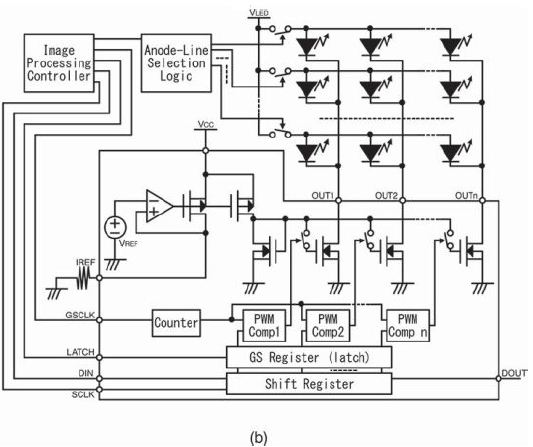 图 11.采用 ON/OFF 控制 IC 和 PWM 控制 IC 的 LED 显示系统 总结 首先介绍单个 LED 灯的驱动器电路,再讨论详细的 LED 灯物理特性、显示系统的物理布局与结构以及静态及时分复用控制,进而得出完整的 LED 驱动器 IC 结构。 在第 2 部分,我们将介绍影像处理控制器 IC 与 LED 驱动器 IC 之间的数据传送,并举出实例。另外还将探讨与 LED 显示驱动器 IC 有关的特性主题。 |


网友评论